



























108
Conseil pratique :
Il est tout spécialement recommandé aux débutants de réduire la réaction directe aux ordres de pilotage auxquels
répond le QuadroCopter lorsque la télécommande est autour de la position centrale (fonction exponentielle négative
« Expo »).
Explication :
Le QuadroCopter réagit normalement de manière linéaire. Cela signifie que le déplacement du levier de commande
et la réaction sont synchronisés. Avec une fonction exponentielle négative, le QuadroCopter réagit au début plutôt
lentement à la commande au début du mouvement de la commande, mais plus fort avec des mouvements de commande
plus fort. Ce comportement est particulièrement avantageux pour les débutants qui ont tendance à avoir des mouvements
de pilotage excessifs et à déplacer les leviers de la télécommande de manière plus brusque que nécessaire. Cet effet
est bien sûr souhaité uniquement pour les trois axes de pilotage (roulis, tangage et lacet) et non pour les gaz. La règle
suivante est donc valable : ne pas définir une fonction exponentielle sur la fonction d’accélération.
En d’autres termes : avec la fonction exponentielle négative, le comportement de l’appareil volant est plus lent lorsque
le levier de commande est déplacé dans la zone de la position centrale. Cela survient soit à l’aide du logiciel en option,
soit à l’aide des interrupteurs du QuadroCopter (voir « Beginner-Mode »), soit encore par une fonction « Expo » dis-
ponible sur la télécommande. Seules les télécommandes à microprocesseur disposent du réglage « Expo ». Mais
vous devez procéder avec la plus grande attention, plus l’Expo négative est haute, plus le QuadroCopter a des
réactions agressives dans la zone de fin de mouvement de levier.
Pour le mode de vol « User », vous devez programmer vos propres réglages avec le logiciel de configuration
disponible en option. Pour cela, vous pouvez utiliser le mode débutant ou le mode sport comme modèle et
effectuer les adaptations comme vous le souhaitez. Respectez les instructions du mode d’emploi du kit de
configuration.
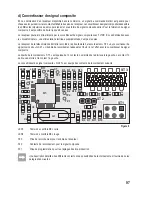
i) Configuration à l’aide du logiciel de l’ordinateur
Pour faire voler le QuadroCopter uniquement avec vos propres paramètres, vous pouvez raccorder le circuit électronique
du QuadroCopter à un ordinateur via un câble d’interface sérielle TTL sur USB.
Un kit de configuration est disponible à cet effet en option pour l’ordinateur. Ce kit comprend un câble de raccordement,
une description détaillée ainsi que le logiciel sur CD. Ce kit peut être utilisé avec Microsoft® Windows XP®*, Windows
Vista®* et Windows 7®* (* Microsoft, Windows XP, Windows Vista et Windows 7 sont des marques déposées de
Microsoft Corporation aux USA et dans d’autres pays).
Comme il n’est pas nécessaire d’effectuer la configuration sur un ordinateur pour un fonctionnement normal, cette
opération n’est mentionnée que de manière accessoire.
Lorsque l’interrupteur DIP 3 se trouve en position « ON », le QuadroCopter se trouve en mode de configuration pour
l’ordinateur (mode PC) et ne peut pas voler. Pour de plus amples informations à propos de la configuration en vue du
raccordement au régulateur de vol « QC 09 » et de la programmation, consultez le mode d’emploi du logiciel.
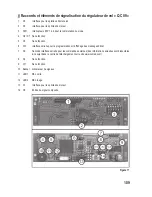
En mode PC (également appelé « mode Bootloader »), la « LED1 » verte doit clignoter en permanence avec env.
1 Hz. Durant la communication avec l’ordinateur, la « LED2 » rouge clignote rapidement, à vitesses variables.
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...































































