




























112
11. Dispositifs de sécurité
Le QuadroCopter est équipé d’une série de dispositifs de sécurité qui le protègent contre les dommages ou les
limitent au minimum. L’état des mécanismes de protection est signalisé par les affichages à DEL. À ce propos, observez
également le chapitre 12 ci-après.
a) Protection du moteur
L’électronique de commande dispose d’une protection du moteur qui coupe automatiquement et immédiatement tous
les moteurs en cas de blocage d’un rotor (par ex. après un crash). Après avoir vérifié l’absence d’éventuels dommages,
les moteurs peuvent être redémarrés à l’aide de la commande de pilotage normale « Démarrage des moteurs ».
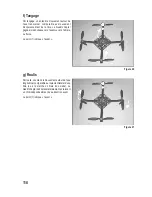
b) Atterrissage d’urgence
Lorsque l’électronique de commande du QuadroCopter détecte de trop fortes perturbations du signal de commande
à distance, elle tente de rétablir la position horizontale du QuadroCopter.
Si la réception est toujours perturbée, le gaz est mis à une valeur légèrement en dessous du vol stationnaire (sans
poids supplémentaire) et le QuadroCopter commence à descendre.
S’il n’y a plus de défaut de réception, le pilote du modèle réduit peut intervenir à tout moment avec ses propres
commandes de pilotage et le programme d’atterrissage d’urgence prend fin.
c) Surveillance des sous-tensions
Le QuadroCopter surveille constamment la tension de la batterie raccordée. Si cette tension chute au-dessous d’une
valeur critique pendant une durée définie, ce défaut est signalisé par les DEL.
La DEL rouge clignote alors et la DEL verte reste allumée en permanence. Cet affichage peut uniquement être
désactivé en débranchant la batterie.
Pour détecter une batterie faible pendant le vol, il est recommandé d’accélérer fortement par intermittence. Si le
QuadroCopter réagit lentement et peu, il est recommandé d’atterrir et de contrôler la batterie. Cela est toutefois
difficile à percevoir en raison de la puissance.
En cas de fonctionnement prolongé sans interruption, il est également recommandé de contrôler les affichages à LED
en atterrissant de temps à autres !
Conseil pratique :
Afin d’éviter toute détérioration du QuadroCopter en cas de crash en présence d’une sous-tension ou en cas de
décharge totale de la batterie, nous vous recommandons de surveiller les signaux lumineux de sous-tension durant le
vol. Comme les DEL intégrées ne diffusent de la lumière que dans une direction, nous recommandons l’installation
d’un LiPo-Saver supplémentaire (n° de commande Conrad 230327). Le LiPo-Saver vous indique une sous-tension
imminente au moyen d’un signal lumineux. Installez le LiPo-Saver à un emplacement approprié du QuadroCopter
puis raccordez-le (par ex. via la prise Balancer de la batterie).
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...







































































