




























116
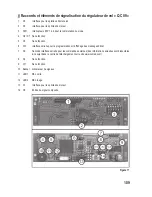
14. Informations relatives au premier démarrage
a) Comportement général lors du pilotage
D’une manière générale, le comportement de pilotage d’un QuadroCopter est le même que celui d’un hélicoptère
normal. Les différences sont toutefois de l’ordre du détail. Avec les hélicoptères, la compensation de couple est
stabilisée par des gyroscopes spéciaux (par le biais de la fonction lacet). Deux différents systèmes sont ici disponi-
bles : Les « gyroscopes conventionnels » ou les gyroscopes avec la fonction « Heading Lock ».
Les gyroscopes conventionnels stabilisent (amortissent) le rotor de queue par rapport aux mouvements rotatifs qui
sont causés par le pilote (modifications de la vitesse de rotation ou du pas) ou par des influences extérieures (par ex.
vent latéral). En revanche, un gyroscope avec une fonction « Heading Lock » dispose d’un effet de retenue contre ces
mouvements rotatifs. Après une instruction de pilotage (par ex. « lacet vers la gauche » puis position neutre), les deux
systèmes réagissent en arrêtant immédiatement le mouvement de rotation.
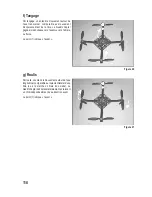
Contrairement aux hélicoptères traditionnels, votre QuadroCopter est équipé de trois gyroscopes sur les fonctions
Lacet, Tangage et Roulis. En comparaison avec les gyroscopes traditionnels, les gyroscopes intégrés au Quadro-
Copter ne doivent pas être qualifiés de « gyroscopes normaux » ou de gyroscopes avec fonction « Heading Lock ».
Les gyroscopes du QuadroCopter sont reliés entre eux, de manière à ce que le QuadroCopter essaye toujours, après
une commande, de revenir en position neutre (vol stationnaire). La manière dont il parvient à effectuer cela dépend de
l’espace disponible, de la vitesse de vol ou de l’état de vol prédominant, des valeurs de compensation du Quadro-
Copter ainsi que des conditions extérieures de vol comme le vent.
Des capteurs MEMS de grande qualité sont intégrés au régulateur de vol « QC 09 » installé dans le QuadroCopter.
Ceci permet de maîtriser les caractéristiques de vol relativement facilement, comme avec un hélicoptère coaxial.
Cette technique de capteurs limite cependant l’agilité du QuadroCopter. Lorsque la fonction « Agility-Mode » est
activée, les fonctions des capteurs du régulateur de vol sont limitées. Dans ce mode, le QuadroCopter peut être piloté
avec une agilité nettement améliorée sur tous les axes. Les caractéristiques de vol ressemblent alors plutôt à celles
d’un hélicoptère. Il est alors également possible de réaliser des figures acrobatiques (looping, tonneaux).
Lorsque la fonction « Agility-Mode » est activée, les caractéristiques de vol ne conviennent plus aux débutants. Lorsque
vous ne disposez pas encore d’une expérience suffisante avec les QuadroCopter et / ou les hélicoptères, nous vous
recommandons de faire preuve d’une grande prudence durant les premiers vols en « Agility-Mode ».
b) Démarrage des moteurs
• Les DEL signalisent « Ready to Fly »
• ACCÉLÉRATION à zéro, LACET à fond vers la gauche, TANGAGE et ROULIS restent en position neutre (voir
également figure 12)
• Les rotors commencent à tourner puis passent en vitesse de ralenti
• La DEL rouge est allumée en continu et la DEL verte clignote (« Moteurs en marche »)
• Augmenter lentement l’ACCÉLÉRATION pour décoller (vol stationnaire)
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...





























































