




























152
c) Afstelling van de neutrale positie
Voor een correcte functie van de stabilisatie van de QuadroCopter moet de neutrale positie worden ingesteld. Dat is
de positie die de QuadroCopter probeert te stabiliseren, als geen andere vliegmanoeuvre gewenst is.
Ga hiervoor als volgt te werk:
1) Schakel de zender in.
2) Zet GAS op nul en alle andere hendels en trimfuncties in de neutrale positie.
3) Plaats de QuadroCopter op een horizontaal, effen oppervlak.
4) Sluit de accu op de QuadroCopter aan.
5) De rode LED van de QuadroCopter moet uit en de groene moet oplichten.
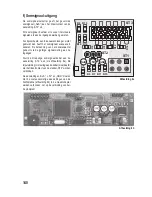
6) Beweeg GAS naar de volle uitslag en GIER
naar de volle uitslag naar rechts (afbeelding
18).
7) De groene LED van de QuadroCopter knippert als bevestiging en de neutrale positie wordt opgeslagen.
8) Beweeg het GAS weer op 0, GIER, NICK en ROLL in de neutrale positie.
9) De rode LED is uit en de groene LED moet oplichten. De QuadroCopter is nu startklaar.
Stelt u de neutrale positie niet in, gebruikt de QuadroCopter of de fabrieksinstelling of de laatst opgeslagen waarde!
Het is heel belangrijk dat de neutrale positie van de QuadroCopter zo nauwkeurig mogelijk wordt ingesteld.
Daarvoor moet u de neutrale positie op een absoluut horizontaal oppervlak instellen. In het ideale geval
wordt het oppervlak met een waterpas gemeten.
Voor het eerste vliegen raden wij dus nadrukkelijk aan om de neutrale positie in te stellen. Op grond van andere
omgevingscondities dan in de fabriek of de feitelijke vliegplaats, kunnen de fabrieksinstellingen niet ideaal zijn!
Indien de QuadroCopter ondanks de passende triminstellingen op de zender nog steeds naar een richting afwijkt,
moet de neutrale positie nog een keer worden opgeslagen door de QuadroCopter even aan de kant op te tillen,
waarna het model afwijkt. Daardoor wordt deze (gemanipuleerde) positie als nieuwe nulpositie opgeslagen.
Afbeelding 18
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...































































