
























158
c) Stoppen van de motoren
De draaiende motoren kunnen als volgt worden uitgezet:
• GAS nop nul, GIER op volle uitslag naar rechts, NICK en ROLL blijven op neutraal
• De rotoren stoppen
• Rode LED staat uit, groene LED staat continu aan („Ready to Fly“)
d) Zweefvlucht
Om de beschrijving van de besturing eenvoudiger en homogener te maken, worden ook hier de gebruikelijke
termen gebruikt. Deze zijn afkomstig uit de pilotentaal en zijn wijdverbreid.
Richtingsaanduidingen moeten daarbij steeds uit het perspectief van een „virtuele“ piloot in het model begrepen
worden. De richtingwijzer in de landingspoot geldt als „voren“. De verklaringen baseren allemaal op een configuratie
van de afstandsbediening in modus 2.
Met zweven wordt de vliegtoestand aangeduid, waarin de QuadroCopter noch stijgt noch daalt en dus de naar boven
gerichte stijgkracht gelijk is aan de naar beneden gerichte gewichtskracht. Deze toestand wordt ongeveer bereikt bij
de middelste gaspositie (dit is echter afhankelijk van een eventueel voorhanden nuttige last).
Bij het vliegen net over de grond alsmede bij de start ontstaan wervelingen en luchtstromen, die invloed
hebben op de QuadroCopter. Daardoor ontstaat een snellere reactie op de stuurbewegingen alsmede
een lichte afwijking van de QuadroCopter naar voren, achteren of de zijkant. Vanaf een vlieghoogte van
ca. een meter is dit effect niet meer voelbaar. De QuadroCopter laat zich nu makkelijker en preciezer
besturen.
e) Gier
Gieren is het draaien van de QuadroCopter om de
oprechte as (verticale as).
Deze beweging kan ongewenst optreden op grond
van het draaimoment van de rotoren of gewenst
als verandering van de vliegrichting.
Bij de QuadroCopter wordt deze beweging niet met
en staartrotor gecontroleerd, maar door een
verandering van het toerental van de afzonderlijke
rotoren t.o.v. elkaar.
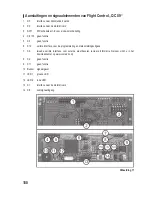
Punt (1) verwijst naar de „voorkant“.
Afbeelding 19
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...







































































