




























35
c) Stoppen der Motoren
Die laufenden Motoren können folgendermaßen abgestellt werden:
• GAS auf null, GIER auf Vollausschlag nach rechts, NICK und ROLL bleiben auf Neutral
• Rotoren stoppen
• Rote LED ist aus, grüne LED leuchtet dauernd („Ready to Fly“)
d) Schwebeflug
Um die Erklärung der Steuerung einfacher und einheitlicher zu gestalten, werden auch hier die klassi-
schen Begriffe verwendet. Diese kommen aus der Fliegersprache und haben sind weit verbreitet.
Richtungsbezeichnungen sind dabei stets aus der Perspektive eines „virtuellen“ Piloten im Modell zu verstehen. Der
Richtungsanzeiger im Landebein gilt als „vorne“. Die Erklärungen basieren alle auf einer Konfiguration der Fernsteue-
rung im Mode 2.
Als Schweben wird jener Flugzustand bezeichnet, an dem der QuadroCopter weder steigt noch sinkt, somit die nach
oben gerichtete Auftriebskraft gleich der nach unten gerichteten Gewichtskraft ist. Dies wird in etwa bei mittlerer
Gasstellung erreicht (allerdings abhängig von einer eventuell vorhandenen Nutzlast).
Bei einem Flug knapp über dem Boden sowie beim Start entstehen Verwirbelungen und Luftströmungen,
die den QuadroCopter beeinflussen. Dadurch ergibt sich eine schnellere Reaktion auf die Steuer-
bewegungen sowie ein leichtes Ausbrechen des QuadroCopter nach vorne, hinten oder zur Seite. Ab
einer Flughöhe von ca. einem Meter ist dieser Effekt nicht mehr zu spüren. Der QuadroCopter lässt sich
nun leichter und präziser steuern.
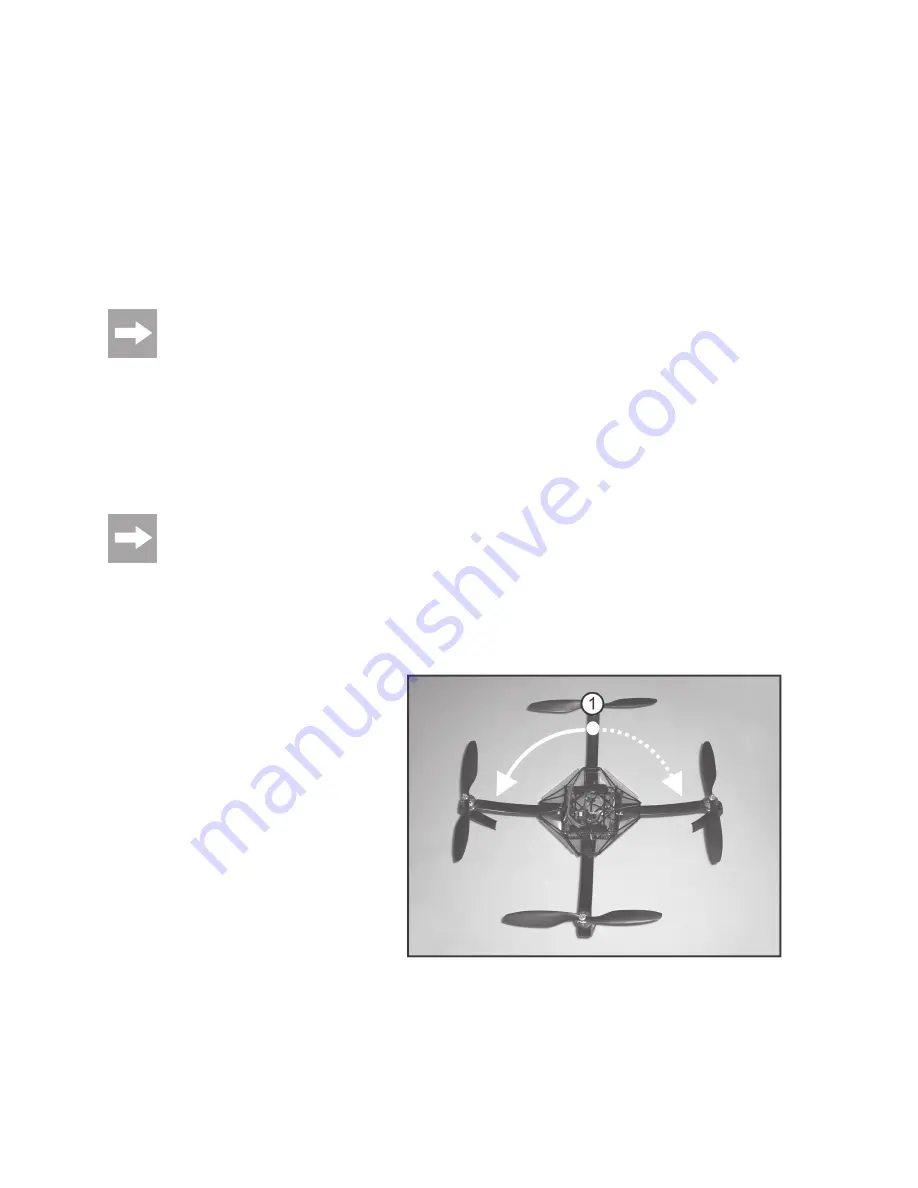
e) Gier
Als Gier wird die Drehung des QuadroCopter um
die Hochachse (senkrechte Achse) genannt.
Diese Bewegung tritt entweder ungewollt aufgrund
des Drehmoments der Rotoren oder gewollt als
Flugrichtungsänderung auf.
Beim QuadroCopter wird diese Bewegung nicht mit
einem Heckrotor kontrolliert, sondern durch
Drehzahländerung der einzelnen Rotoren zuein-
ander.
Der Punkt (1) zeigt „vorne“ an.
Bild 19
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...

































































