





















132
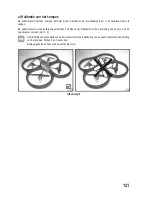
12. Vliegen in headless-mode
Zoals beschreven in hoofdstuk 10, is het bij het begin van de vleigtraining zeer belangrijk dat de piloot achter de quad-
ricopter staat en dat de quadricopter met de twee rode propellers vooruit gericht is. Pas dan worden de bewegingen
van de quadricopter vanuit het oogpunt van de piloot uitgevoerd zoals via de afstandsbediening ingegeven wordt.
Ongeacht in welke richting gestuurd wordt, zal de piloot de quadricopter exact in die richting zien vliegen.
Wanneer de Quadricopter zich echter in de lucht draait en met de twee rode propellers in de richting van de piloot
beweegt, zal de quadricopter vanuit het oogpunt van de piloot precies het tegenovergestelde doen van wat via de
afstandsbediening ingegeven wordt. Omdat dit heel gemakkelijk kan leiden tot stuurfouten, werd de headless-modus
ontwikkeld. In deze vliegmode is de kant met de rode propellers niet meer „vooruit“, maar de richting waarin hij werd
afgestemd bij het inschakelen.
Om in de headless-mode te vliegen, ga als volgt te werk:
Voer vervolgens een kalibratie van het kompas uit, indien dit nog niet gebeurde op de plaats van gebruik van de
quadricopter.
Plaats vervolgens de quadricopter op de grond en richt hem in de gewenste richting (bijvoorbeeld in de lijn van het
zicht op een kerktoren). Neem eerst de afstandsbediening en vervolgens het model in gebruik. De quadricopter mag
daarbij niet worden gedraaid of verplaatst,
Stelt u zich precies achter de quadricopter op, zodat u in dezelfde richting kijkt als waar u de quadricopter naar gericht
heeft. Start de motoren en laat het model opstijgen.
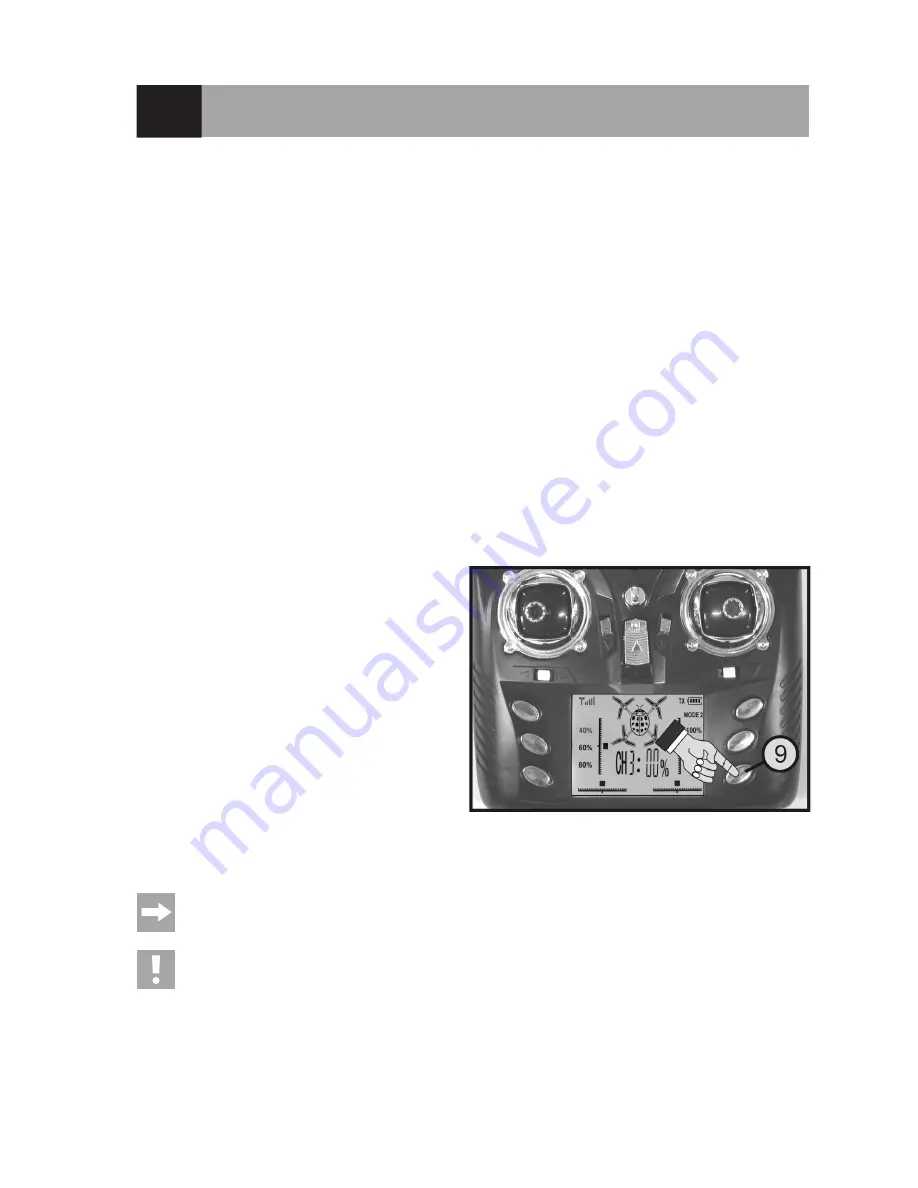
Controleer het juiste vlieggedrag en stel de gewenste regelgevoeligheid (40, 60, 80 of 100%) in.
Houd de schakelaar voor de foto-functie (zie afb. 1, pos.
9) ingedrukt tot de afstandsbediening voortdurend piept.
De quadricopter vliegt nu in headless-mode.
U kunt nu met de gier-functie de quadricopter 180°
draaien, zodat deze met de twee rode propellers naar
u wijst.
Als u naar rechts stuurt, zal de quadricopter vanuit uw
standpunt naar rechts vliegen. In de „normale modus“
zou het model vanuit uw standpunt gezien naar links
vliegen.
Als u naar voren stuurt, zal de quadricopter niet naar u
toe vliegen, maar in de richting van de kerktoren.
Om de headless-mode weer uit te schakelen, drukt u
opnieuw op de schakelaar voor de foto-functie, totdat de
afstandsbediening drie keer snel achter elkaar piept.
Mocht de quadricopter de startrichting niet zuiver aanhouden, dan moet het kompas in het model opnieuw
gekalibreerd worden.
Attentie, belangrijk!
Om de headless-mode goed te kunnen gebruiken, is het noodzakelijk dat u altijd achter de quadricopter
staat en kijkt in de richting waarin u de quadricopter bij de start hebt uitgelijnd.
Afbeelding 20
Summary of Contents for Cyclone Multi
Page 10: ...10 8 Bedienelemente des Senders Ansicht Vorderseite Bild 1 ...
Page 44: ...44 8 Transmitter controls Front view Figure 1 ...
Page 78: ...78 8 Éléments de commande de l émetteur Vue de face Figure 1 ...
Page 112: ...112 8 Bedieningselementen van de afstandsbediening Vooraanzicht Afbeelding 1 ...
Page 138: ...138 ...
Page 139: ...139 ...

























































