
























98
12. Vol en mode Headless
Comme décrit au chapitre 10, il est très important que le pilote se tienne derrière le quadrirotor et que le quadrirotor
et les deux hélices rouges soient orientés vers l‘avant au début des essais de vol. C‘est seulement ainsi que les
mouvements de vol du quadrirotor peuvent être exécutés exactement comme ils ont été commandés sur l‘émetteur
de la perspective du pilote. Peu importe dans quelle direction la commande est effectuée, le pilote voit le quadrirotor
voler exactement dans cette direction.
Si le quadrirotor tourne par contre pendant le vol de sorte que les deux hélices rouges pointent en direction du pilote,
le quadrirotor se déplace exactement dans le sens opposé à celui du pilote, contrairement aux commandes effectuées
sur l‘émetteur. Étant donné que des erreurs de pilotage peuvent très vite se produire dans de tels cas, le mode Head-
less a été mis au point. Dans ce mode, le côté avec les hélices rouges n‘est plus à « l‘avant » pour le quadrirotor, mais
plutôt le point cardinal vers lequel le quadrirotor était orienté au moment du démarrage.
Procédez comme suit pour voler en mode Headless :
Procédez d‘abord à l‘étalonnage de la boussole si cela n‘a pas encore été effectué sur le lieu d‘utilisation du quadr-
irotor.
Posez ensuite le quadrirotor au sol et orientez-le dans la direction souhaitée (p. ex. dans la direction d‘un clocher).
Allumez l‘émetteur, puis le quadrirotor. Le quadrirotor ne doit plus être tourné ni déplacé,
Placez-vous directement derrière le quadrirotor à une distance de quelques mètres, de sorte que vous regardiez dans
la même direction que celle dans laquelle vous avez orienté le quadrirotor. Mettez les moteurs en marche et laissez
le modèle décoller.
Vérifiez le bon comportement de vol et réglez la sensibilité de guidage souhaitée (40, 60, 80 ou 100 %).
Appuyez et maintenez le commutateur pour la fonction
photo (voir figure 1, pos. 9), jusqu‘à ce que l‘émetteur
émette des bips en permanence. Le quadrirotor vole
maintenant en mode Headless.
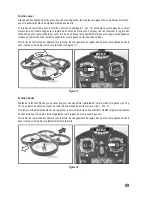
Vous pouvez maintenant tourner le quadrirotor à 180°
avec la fonction de lacet, afin que les deux hélices
rouges pointent dans votre direction.
Si vous pilotez vers la droite, le quadrirotor volera vers la
droite de votre perspective. En « mode normal », le mo
-
dèle volerait vers la gauche de votre perspective dans
cette situation.
Si vous pilotez vers l‘avant, le quadrirotor ne volera pas
dans votre direction, mais en direction du clocher.
Pour désactiver le mode Headless, appuyez à nouveau
sur le commutateur pour la fonction photo jusqu‘à ce
que l‘émetteur émette rapidement trois bips.
Si le quadrirotor ne maintient pas correctement l‘orientation de démarrage, la boussole du modèle doit à
nouveau être étalonnée.
Attention, important !
Pour une utilisation optimale du mode Headless, il est nécessaire de toujours se tenir derrière le quadrirotor
et de regarder dans la direction dans laquelle vous avez orienté le quadrirotor avant le démarrage.
Figure 20
Summary of Contents for Cyclone Multi
Page 10: ...10 8 Bedienelemente des Senders Ansicht Vorderseite Bild 1 ...
Page 44: ...44 8 Transmitter controls Front view Figure 1 ...
Page 78: ...78 8 Éléments de commande de l émetteur Vue de face Figure 1 ...
Page 112: ...112 8 Bedieningselementen van de afstandsbediening Vooraanzicht Afbeelding 1 ...
Page 138: ...138 ...
Page 139: ...139 ...