





























20
b) Trimming the quadcopter
The quadcopter is not 100% stable and may drift in a certain direction. This is caused by external factors
(e.g. wind) and incorrectly calibrated sensors (gyroscopes). This is normal and the drift can be largely
eliminated by calibrating the sensors and using the trim function.
If the quadcopter drifts in one direction, trim the quadcopter in the opposite direction using the corresponding trim on
the remote control.
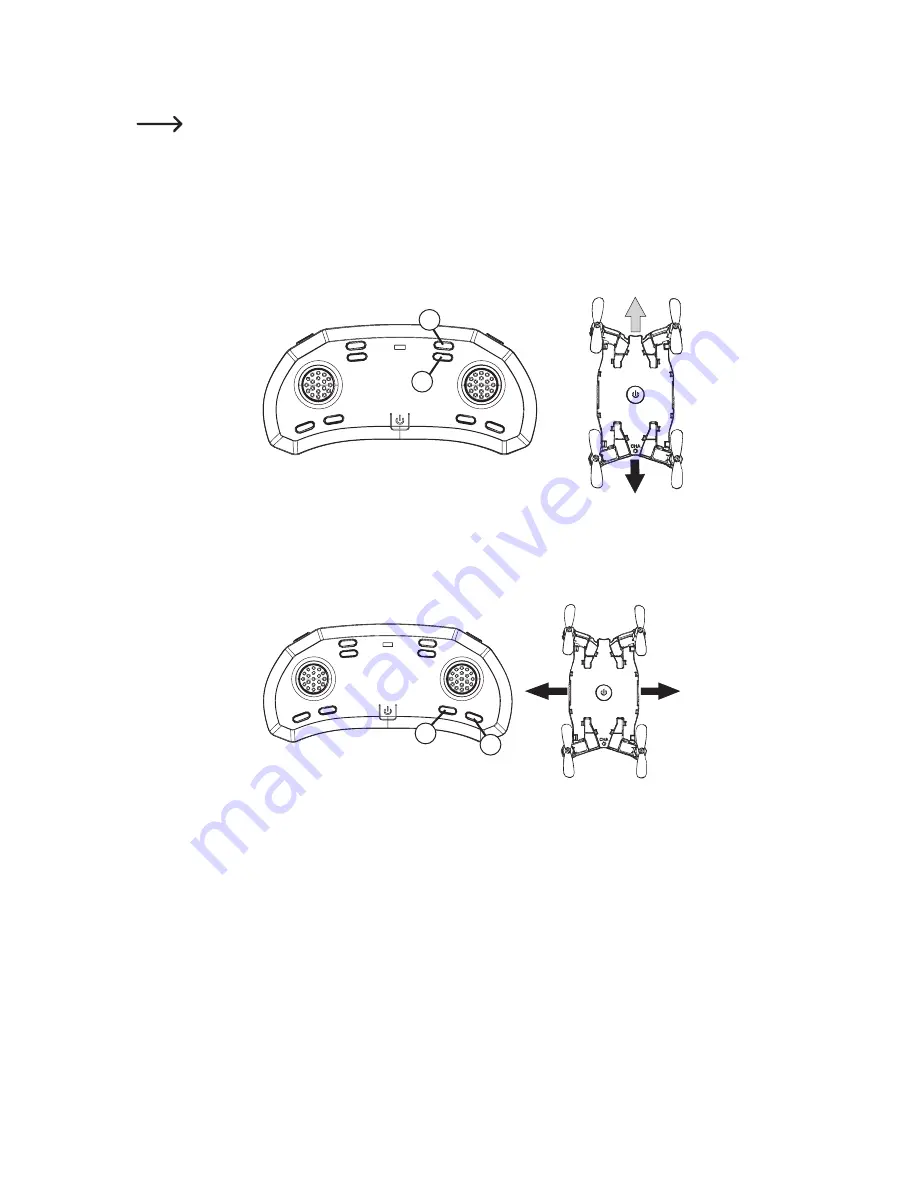
For example, if the quadcopter drifts forwards (pitch), press the backwards pitch trim button (figure 4/9, position 9)
numerous times until the quadcopter stops drifting forwards. If the model drifts backwards, use the forwards trim but-
ton (figure 4/9, position 8).
Figure 9
If the quadcopter drifts to the left (roll), press the right-hand roll trim button (figure 4/10, position 14) numerous times
until the quadcopter stops drifting to the left. If the model drifts to the right, use the left-hand trim button (figure 4/10,
position 13).
Figure 10
c) Calibrating the quadcopter
If the trim is not sufficient to make the quadcopter hover in a fixed position (e.g. after a crash), the sensors need to be
recalibrated. Place the quadcopter on a level surface.
Press the "Calibration" button (figure 4, position 7) on the remote control. The LEDs on the quadcopter will flash
rapidly.
The LEDs will stay constant when calibration is complete.
8
9
13
14
Summary of Contents for Pocket Drone FPV
Page 1: ...Operating Instructions Electrical quadrocopter Pocket Drone FPV RtF Item No 1642774 ...
Page 38: ...38 ...
Page 39: ...39 ...


































































