



























18
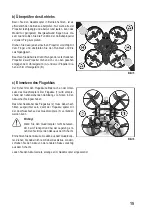
Gier-Funktion
Durch die zwei rechtsdrehenden und die zwei linksdrehenden Propeller, sind die Drehmomente, die auf das Modell
einwirken, ausgeglichen und der Quadrocopter schwebt stabil in der Luft.
Wird der linke Steuerknüppel (siehe auch Bild 1, Pos. 12) nach links bewegt, erhöht die Elektronik im Modell die
Drehzahl der von oben gesehen nach rechts (im Uhrzeigersinn) drehenden Propeller und verringert gleichzeitig die
Drehzahl der nach links (entgegen dem Uhrzeigersinn) drehenden Propeller. Dadurch bleibt die gesamte Auftriebs-
kraft gleich, aber auf das Modell wirkt nun ein Drehmoment, das den Quadrocopter von oben gesehen um die Hoch-
achse nach links dreht.
Wird der Steuerknüppel nach rechts bewegt, fallen die Drehzahländerungen der Propeller genau umgekehrt aus und
das Modell dreht sich nach rechts (siehe Pfeile in Bild 9).
Bild 9
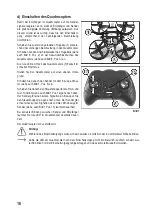
Roll-Funktion
Mit Hilfe der Roll-Funktion können Sie den Quadrocopter seitlich nach rechts und links bewegen (siehe Bild 10). Die
Steuerung erfolgt mit dem rechten Steuerknüppel (siehe auch Bild 1, Pos. 4).
Wird der Knüppel leicht nach links gesteuert, werden von der Elektronik im Quadrocopter die Propellerdrehzahlen so
verändert, dass sich das Modell leicht seitlich nach links neigt und somit auch nach links fliegt.
Steuern Sie am Sender nach rechts, fallen die Drehzahländerungen der Propeller genau umgekehrt aus und das
Modell fliegt seitlich nach rechts (siehe Pfeile in Bild 10).
Bild 10






































































