


























21
g) Starten des Quadrocopters
Um den Quadrocopter zu starten, stehen Ihnen zwei Methoden zur Verfügung:
1) Manueller Start:
Schalten Sie den Fernsteuersender und den Quadrocopter wie zuvor beschrieben ein. Die LED am Quadrocopter und
die LED am Sender müssen dauerhaft leuchten.
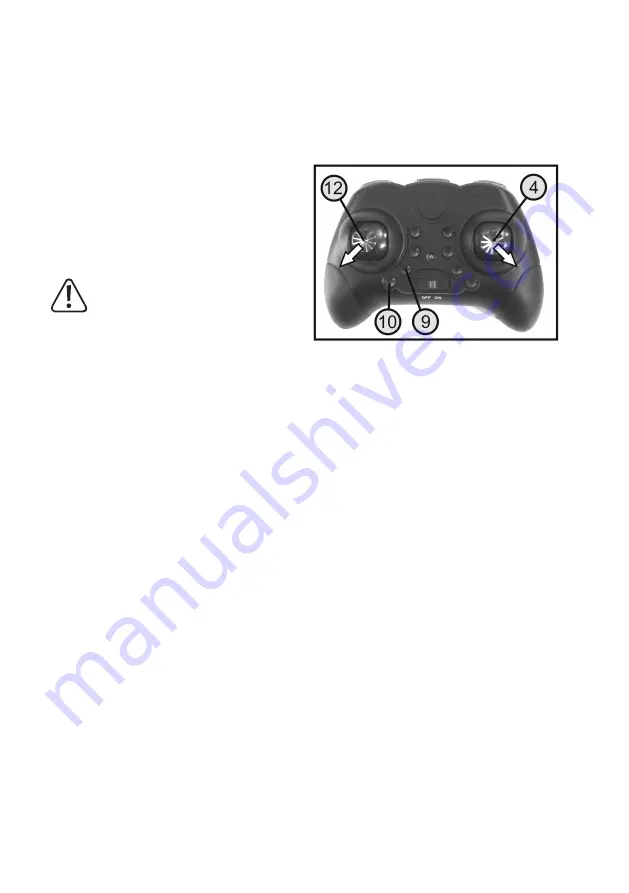
Bewegen Sie den linken Steuerknüppel (siehe auch Bild
1, Pos. 12) in die linke untere Ecke und den rechten Steu-
erknüppel (siehe auch Bild 1, Pos. 4) in die rechte untere
Ecke (siehe Pfeile in Bild 12).
Halten Sie die beiden Knüppel in dieser Position fest, bis
die Propeller anlaufen und sich mit geringer Drehzahl dre-
hen.
Wichtig!
Um die Propeller nach dem Anlaufen wieder zu
stoppen, muss der linke Steuerknüppel in die
rechte untere Ecke und der rechte Steuerknüp-
pel in die linke untere Ecke bewegt werden (sie-
he dunkle Pfeile in Bild 15).
Wenn die Propeller laufen, bewegen Sie die beiden Steuerknüppel wieder zurück in die Mittelstellung. Die rote LED
am Quadrocopter blinkt langsam.
Wenn Sie nun den linken Steuerknüppel vorsichtig nach vorne bewegen, wird der Quadrocopter die Propellerdreh-
zahlen deutlich erhöhen und abheben. Die rote LED am Quadrocopter leuchtet nun dauerhaft.
Mit dem rechten Steuerknüppel können Sie ein eventuelles Abdriften nach vorne oder hinten bzw. zur Seite leicht
korrigieren.
Ist die gewünschte Flughöhe erreicht, bewegen Sie den linken Steuerknüppel wieder in die Mittelstellung.
Der Quadrocopter kann nun selbsttätig auf gleichbleibender Höhe schweben.
Mit den beiden Steuerknüppeln kann nun die Flughöhe und die Flugrichtung individuell gesteuert werden.
2) Automatischer Start:
Schalten Sie den Fernsteuersender und den Quadrocopter wie zuvor beschrieben ein.
Betätigen Sie kurz die Drucktaste für die Start- und Lande-Funktion (siehe Bild 12, Pos. 9).
Die Propeller laufen an und der Quadrocopter hebt ab und geht anschließend automatisch in den Steigflug über.
Während dem Steigflug blinkt die LED im Quadrocopter langsam.
Mit dem rechten Steuerknüppel können Sie ein eventuelles Abdriften während des Steigfluges leicht korrigieren.
Wenn der Steigflug nach ca. 80 cm abgeschlossen ist, schwebt der Quadrocopter selbsttätig auf gleichbleibender
Höhe.
Mit den beiden Steuerknüppeln kann nun die Flughöhe und die Flugrichtung individuell gesteuert werden.
Bild 12




























































