

























27
13. Fliegen im Headless-Mode
Die Bewegungsrichtung des Quadrocopters ist immer davon abhängig, in welche Richtung das Modell zum Piloten
ausgerichtet ist bzw. von welcher Seite der Pilot den Quadrocopter betrachtet. Man kann sich also sehr schnell ver-
steuern, wenn man das Modell nicht von hinten, sondern von der Seite oder von vorne sieht. Aus diesem Grund wurde
der Quadrocopter mit dem Headless-Mode ausgestattet.
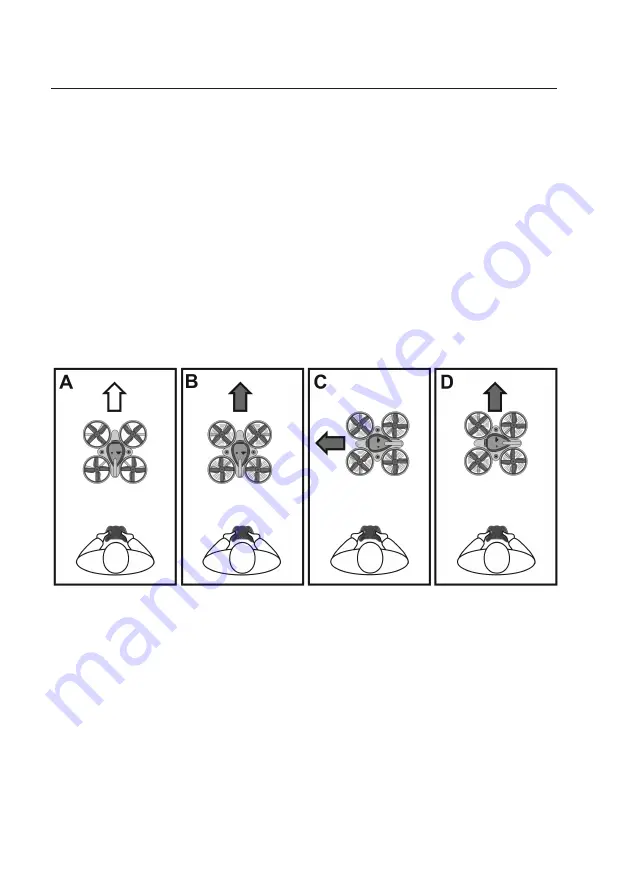
Um den Headless-Modus effektiv nutzen zu können, ist es jedoch erforderlich, dass der Quadrocopter vor dem Vor-
und Zurückbewegen des Pitch-Steuerknüppels mit der Vorderseite (Blickrichtung der Kamera) in die gewünschte
Vorwärts-Richtung ausgerichtet wird (siehe weißen Pfeil in Bild 17, Abb. A).
Solange der Modellpilot dann genau hinter dem Quadrocopter steht und in die zuvor festgelegte Richtung blickt, wird
der Quadrocopter so reagieren, wie am Sender gesteuert wird. Wenn nach vorne gesteuert wird, fliegt der Quadro
-
copter aus Sicht des Piloten auch nach vorne (siehe dunkler Pfeil in Bild 17, Abb. B).
Wenn sich der Quadrocopter im Flug z.B. um 90° nach links gedreht hat und nun mit seiner linken Seite zum Piloten
ausgerichtet ist, wird er aus der Sicht des Piloten nach links fliegen, wenn am Sender nach vorne gesteuert wird
(siehe dunkler Pfeil in Bild 17, Abb. C).
Bei Aktivierung des Headless-Modus spielt es keine Rolle, in welche Richtung die Vorderseite des Quadrocopters
ausgerichtet ist. Wenn am Sender nach vorne gesteuert wird, fliegt der Quadrocopter immer in die Richtung, die beim
Einschalten als „vorne“ festgelegt wurde (siehe dunkler Pfeil in Bild 17, Abb. D).
Bild 17
Normal-Mode
Normal-Mode
Headless-Mode