




























410
100%
0
100%
LOAD
S
P
E
E
D
Figure 43. Fixed Speed Droop With Load Change
With Torque Control models
:
D
IR drop compensation is used to reduce the speed rise above the
speed limit threshold due to a loss of load torque.
D
Turn IR DROP to minimize speed rise due to loss of load.
D
Note that excessive IR drop compensation can cause motor
instability and hunting. Motors that have a speed drop that varies
excessively with operating speed cannot use IR drop compensation.
A tachomter should be used for better speed regulation.
11. Press the Stop switch and wait for the motor to completely stop.
Remove AC input power.
12. If you have a Process Control model, proceed to Setup the
Process Interface."
Setup for Process Interface (On 05721031
Regulator Boards only)
NOTE
: The process control input (plus and minus) is buffered from the
armature circuit by 300K ohms of resistance. The buffered reference
signal output on TB4126 is positive with input TB4(6+) and TB4(5-).
Inputs at TB4(6+) or TB4(5-) may be grounded or left ungrounded as
required by the signal source equipment.
1. Disconnect power.
2. Push the Automatic/Manual switch to Auto.
DANGER
THE PROCESS INTERFACE SIGNAL INPUT TERMINALS TB4(6+) AND
TB4(5-) ARE RESISTIVELY ISOLATED FROM LINE POTENTIAL WHEN AC
POWER IS CONNECTED. DISCONNECT AND LOCKOUT ALL UNGROUNDED
CONDUCTORS OF THE AC POWER LINE. FAILURE TO OBSERVE THESE
PRECAUTIONS COULD RESULT IN SEVERE BODILY INJURY OR LOSS OF
LIFE.
Summary of Contents for DC2 VS series
Page 1: ......
Page 2: ......
Page 3: ......
Page 4: ......
Page 5: ......
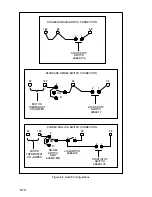
Page 31: ...3 16 419 519 TB2 Motor Mounted D C Tachometer Figure 3 8 D C Tachometer Connection...
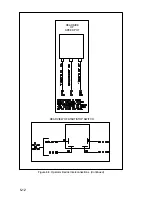
Page 48: ...5 6 Figure 5 1 Wiring Diagram of Basic Speed Controller 0 57210 30...
Page 49: ...5 7...
Page 51: ...5 9 J4...







































































