






















55
Table 52. Servicing Steps. (Continued)
Motor does not
reach top speed
or deliver rated
torque.
Low line voltage.
Check for rated line voltage
and correct if not within 10%
of the input voltage rating.
Unstable
speed or poor
regulation when
applied as an
armature voltage
regulator.
Incorrectly set IR drop com
pensation pot.
Readjust IR drop compensa
tion pot. Check tachometer.
Incorrect speed
with tachometer
feedback.
Motor runs at
maximum
uncontrolled
speed with
tachometer
feedback
DC tachometer polarity not
correct for given direction of
motor rotation, 419 negative
with respect to 519.
Verify DC tachometer polar
ity and lead connection.
Motor speed
unstable with
changing load.
(Tach Feedback
only)
IR drop compensation pot not
set at zero (CCW).
Set IR drop compensation
pot to zero (CCW).
With Process Control models,
improperly set maximum
speed pots.
Reset maximum speed pots.
With Process Control models,
reference signal producing
less than expected maximum
value.
Adjust source of automatic
reference signal or proper
output signal range.
Overload.
Check for cause of overload
and correct.
Improper position jumper.
Check and reconnect
jumper(s) as necessary:
D
J200: Tach Scaling Jumper
D
J3: Controller Output
Current Jumper
Faulty circuit board.
Replace entire controller.
Faulty circuit board.
Replace entire controller.
No DC tachometer output
signal.
Verify tachometer voltage.
Verify tachometer coupling.
Indication
Possible Cause
Corrective Action
Improper feedback selection
at J3.
Check J3 for proper feedback
selection and reposition as
required.
Open field for voltage
Regulators only.
Measure motor field resistance
from drive and connect the
voltage field as required.
Summary of Contents for DC2 VS series
Page 1: ......
Page 2: ......
Page 3: ......
Page 4: ......
Page 5: ......
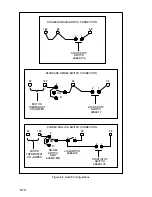
Page 31: ...3 16 419 519 TB2 Motor Mounted D C Tachometer Figure 3 8 D C Tachometer Connection...
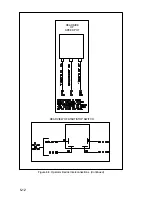
Page 48: ...5 6 Figure 5 1 Wiring Diagram of Basic Speed Controller 0 57210 30...
Page 49: ...5 7...
Page 51: ...5 9 J4...







































































