





















RX72M Group
Single-Chip Motor Control via EtherCAT Communications
R01AN5434EJ0110 Rev.1.10
Page 7 of 85
Aug.31.2020
2.2 Hardware Specifications
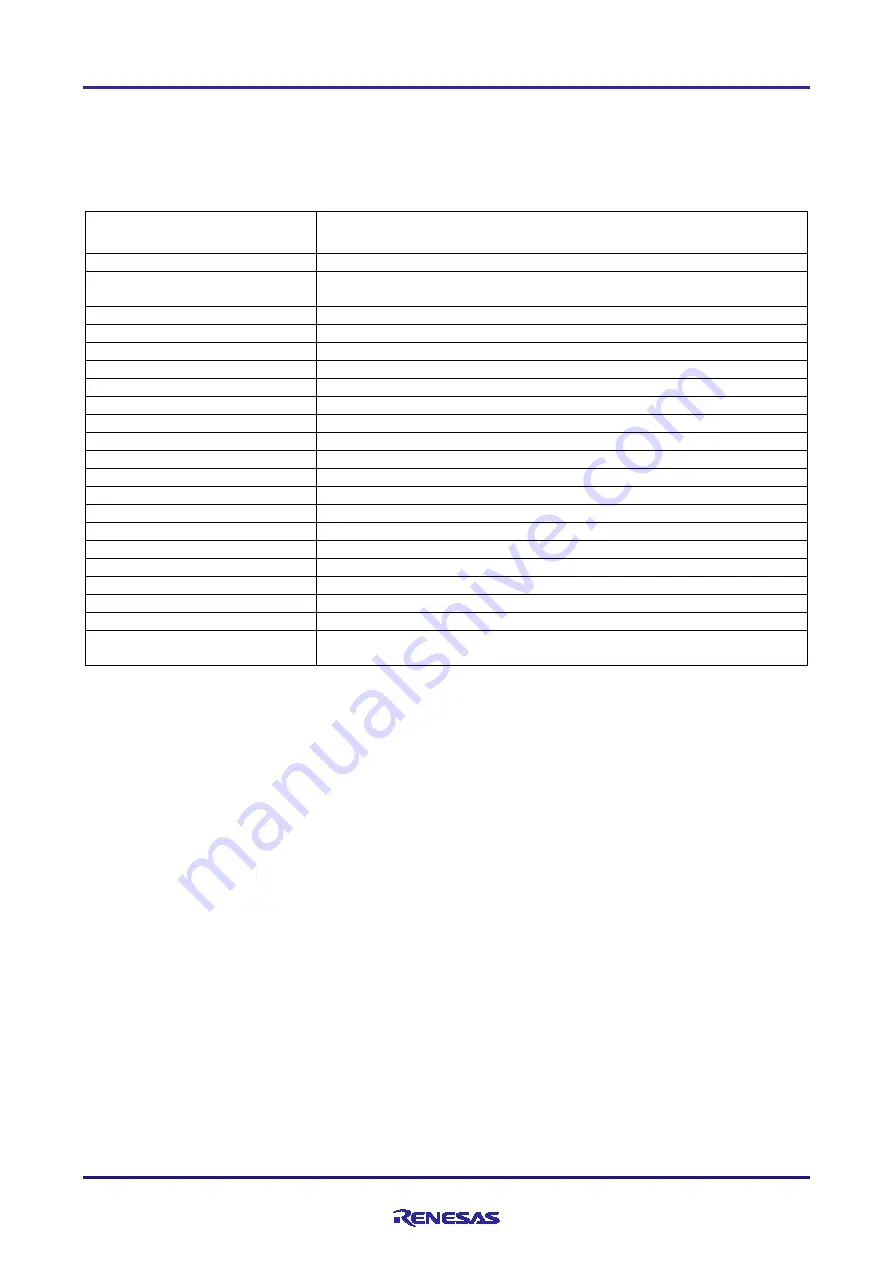
Table 2-1 to Table 2-4 list the pin interfaces for use in the sample program.
Table 2-1 Motor Control Related Pin Interface
Pin Name
Description
P43 / AN003
Inverter’s main line voltage measurement
P47 / AN007
For input of the rotational velocity and position command values
(analog values)
P30
START/STOP toggle switch
P02
ERROR RESET toggle switch
P71
LD1 on/off control
PN4
LD2 on/off control
PH0
LD3 on/off control
P40 / AN000
U-phase current measurement
P42 / AN002
W-phase current measurement
PE1 / MTIOC3B
PWM output (U
p
)
PE2 / MTIOC4A
PWM output (V
p
)
PE3 / MTIOC4B
PWM output (W
p
)
PE0 / MTIOC3D
PWM output (U
n
)
PE5 / MTIOC4C
PWM output (V
n
)
PE4 / MTIOC4D
PWM output (W
n
)
P31 / IRQ1
Hall U-phase input
PD3 / IRQ3
Hall V-phase input
PB0 / IRQ12
Hall W-phase input
PA4 / MTCLKA
Encoder A-phase input
P25 / MTCLKB
Encoder B-phase input
PC4 / POE0#
Input for the emergency signal for stopping the PWM output on
detection of an overcurrent







































































