









B
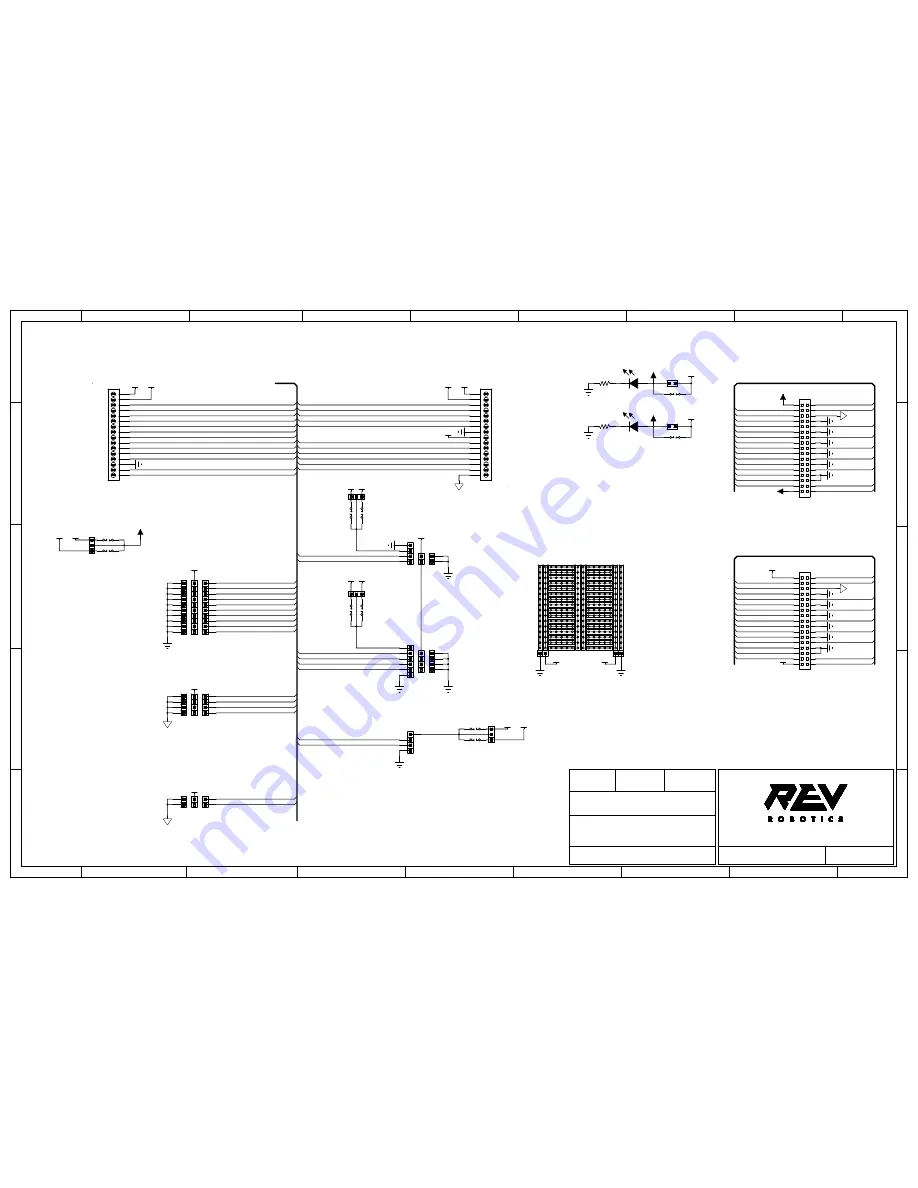
RR-MORE-BD-B
More Board
MXP Breakout Board
WWW.REVROBOTICS.COM
PROJECT
DESCRIPTION
FILENAME
DESIGNER
REVISION
DATE
PART NO.
SHEET
1
1 OF
moreboard-revB.sch
6/7/2015
DAY
Prototype Area
MXP Connector
Left Screw Terminals
Right Screw Terminals
MXP Socket
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
J1
CON-HDR-2X17-0100-THS-DBCOGJ254DS34
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
J2
CON-TERM-SCREW-16P-3MM5-TH-ED555/16DS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
J3
CON-TERM-SCREW-16P-3MM5-TH-ED555/16DS
JP4
JP5
JP6
JP10
JP11
JP12
JP7
JP8
JP9
JP1
JP2
JP3
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
J4
CON-SKT-2X17-0100-THS
JP13
JP15
JP14
JP16
D1
D2
R1
270
R2
680
MXP_SIGNALS
AI0
AI1
AI2
AI3
DIO0/PWM0
DIO1/PWM1
DIO2/PWM2
DIO3/PWM3
DIO4/SPICS
DIO5/SPICLK
DIO6/SPIMISO
DIO7/SPIMOSI
DIO8/PWM4
DIO9/PWM5
DIO10/PWM6
AO0
AO1
UART.RX
UART.TX
DIO11/PWM7
DIO12/PWM8
DIO13/PWM9
DIO14/I2CSCL
DIO15/I2CSDA
+5.0V_MXP
+3.3V_MXP
AGND
+5.0V
+3.3V
+3.3V +5.0V
+5.0V
AGND
MXP_SIGNALS
DIO0/PWM0
DIO1/PWM1
DIO2/PWM2
DIO3/PWM3
DIO4/SPICS
DIO5/SPICLK
DIO6/SPIMISO
DIO7/SPIMOSI
DIO8/PWM4
DIO9/PWM5
DIO10/PWM6
DIO11/PWM7
DIO12/PWM8
DIO13/PWM9
DIO14/I2CSCL
DIO15/I2CSDA
AI0
AI1
AI2
AI3
AO0
AO1
UART.RX
UART.TX
+3.3V
+5.0V
+3.3V
+5.0V
I2C_VCC
DIO14/I2CSCL
DIO15/I2CSDA
+3.3V
+5.0V
SPI_VCC
DIO5/SPICLK
DIO4/SPICS
DIO7/SPIMOSI
DIO6/SPIMISO
DIO12/PWM8
DIO13/PWM9
DIO0/PWM0
DIO1/PWM1
DIO2/PWM2
DIO3/PWM3
DIO8/PWM4
DIO9/PWM5
DIO10/PWM6
DIO11/PWM7
DIO_VCC
DIO_VCC
+5.0V
AGND
AI0
AI1
AI2
AI3
+5.0V
AGND
AO0
AO1
DIO_VCC
+3.3V +5.0V
UART_VCC
UART.TX
UART.RX
+3.3V
+5.0V
+5.0V
+5.0V_MXP
+3.3V
+3.3V_MXP
MXP_SIGNALS
AI0
AI1
AI2
AI3
DIO0/PWM0
DIO1/PWM1
DIO2/PWM2
DIO3/PWM3
DIO4/SPICS
DIO5/SPICLK
DIO6/SPIMISO
DIO7/SPIMOSI
DIO8/PWM4
DIO9/PWM5
DIO10/PWM6
AO0
AO1
UART.RX
UART.TX
DIO11/PWM7
DIO12/PWM8
DIO13/PWM9
DIO14/I2CSCL
DIO15/I2CSDA
AGND
+5.0V_MXP
+3.3V_MXP







































































