





























User Manual
Reference number: 4111A-RADAR4600-GBD-R1.1
Date: 27 February 2018
Page 59 of 149
3.4.19
Loss of Reference Target
In case of loss of Reference Target, a normal ‘Loss of acquired target’ alarm will occur. If GPS calculation is
not available, then only compass data and SDME values are used for OS motion.
A standard log only can measure speed through water and takes no leeway into account. – So true motion
can’t be calculated.
A two axis log only can calculate speed over ground in shallow waters. In deep waters it may use water
layers for the two axis calculation, but this has additional degraded accuracy. So a true motion calculation of
OS will be unreliable.
RECOMMENDATION
When using Reference Target only for speed measuring, select a far ahead fixed target as Reference target.
Observe this target and select a new Reference target before the old one gets weak or moves out of range.
3.4.20
Limitations in case of data loss
To take the advantages of the extended functionality regarding this chapter 3.4, the input from following
external data is necessary:
Gyrocompass or other Transmitting Heading Device (THD)
One- or Two-Axis Log (SDME)
GPS or other Electronic Position Fixing System (EPFS)
Data from AIS Signal receiver
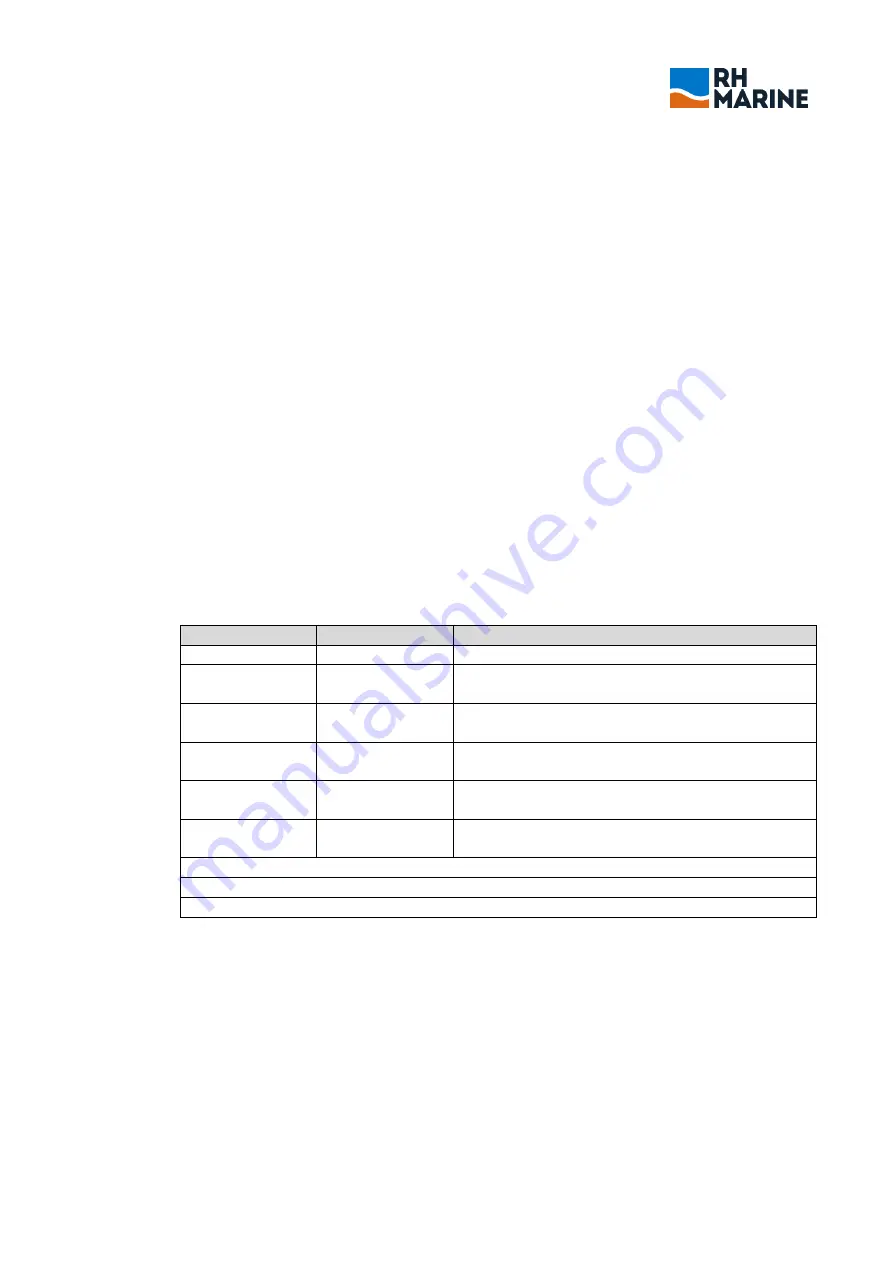
Following table describes the reaction of the RADAR 4600 System in case of different data losses:
Fall back modi in case of data loss:
Failing data
Alarm indication
Fallback Modi
Position
NMEA: no position No fallback because no radar function limitation
Heading
NMEA: no heading Ground stab., speed over ground, rel. motion, rel.
bearing only
Speed over
ground
NMEA: no SOG
Sea stab., speed and course through water, rel. motion,
rel. bearing only
Course over
ground
NMEA: no COG
Sea stab., speed and course through water, rel. motion,
rel. bearing only
Course through
water
NMEA: no CTW
Ground stab., speed and course over ground, rel.
motion rel. bearing only
Speed through
water
NMEA: no STW
Ground stab., speed and course over ground
If no course data are available, radar picture changes to relative bearing.
If no speed through water data available, speed value can be input manually.
If no COG-Data are available, True Motion can be activated by setting a Reference Target







































































