





























RF627Weld [Revision 1.1.1] 03.08.2020
Laser Seam Tracking System for Welding Automation. RF627Weld Series
51
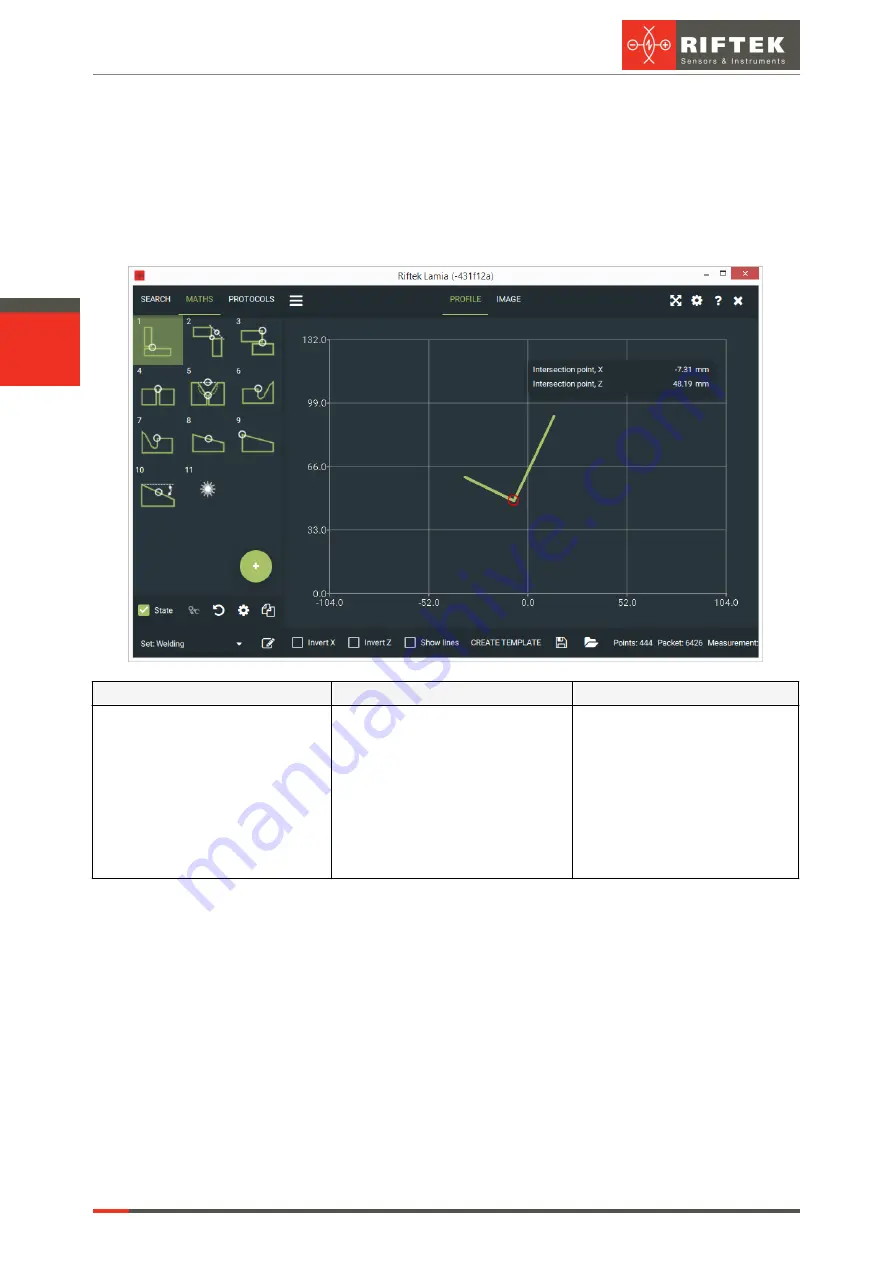
15.5.5.2. "Welding" set
15.5.5.2.1. Template 1 "Fillet weld"
Template 1 is intended to be used for fillet welds. The algorithm looks for two profile
lines and calculates coordinates of their point of intersection. This point of intersection can
be used as the tracking point.
Constraints
Measurements
Parameters
Endpoint distance with check
·
Distance between lines 0 and 1;
the minimum distance is
undefined, the maximum distance
is 20 mm.
Rotation angle
·
Angle of rotation from line 0 to
line 1 (30°...150°); the direction of
rotation is undefined.
Lines intersection
·
Intersection point of lines 0 and 1.
-







































































