





























RF627Weld [Revision 1.1.1] 03.08.2020
Laser Seam Tracking System for Welding Automation. RF627Weld Series
73
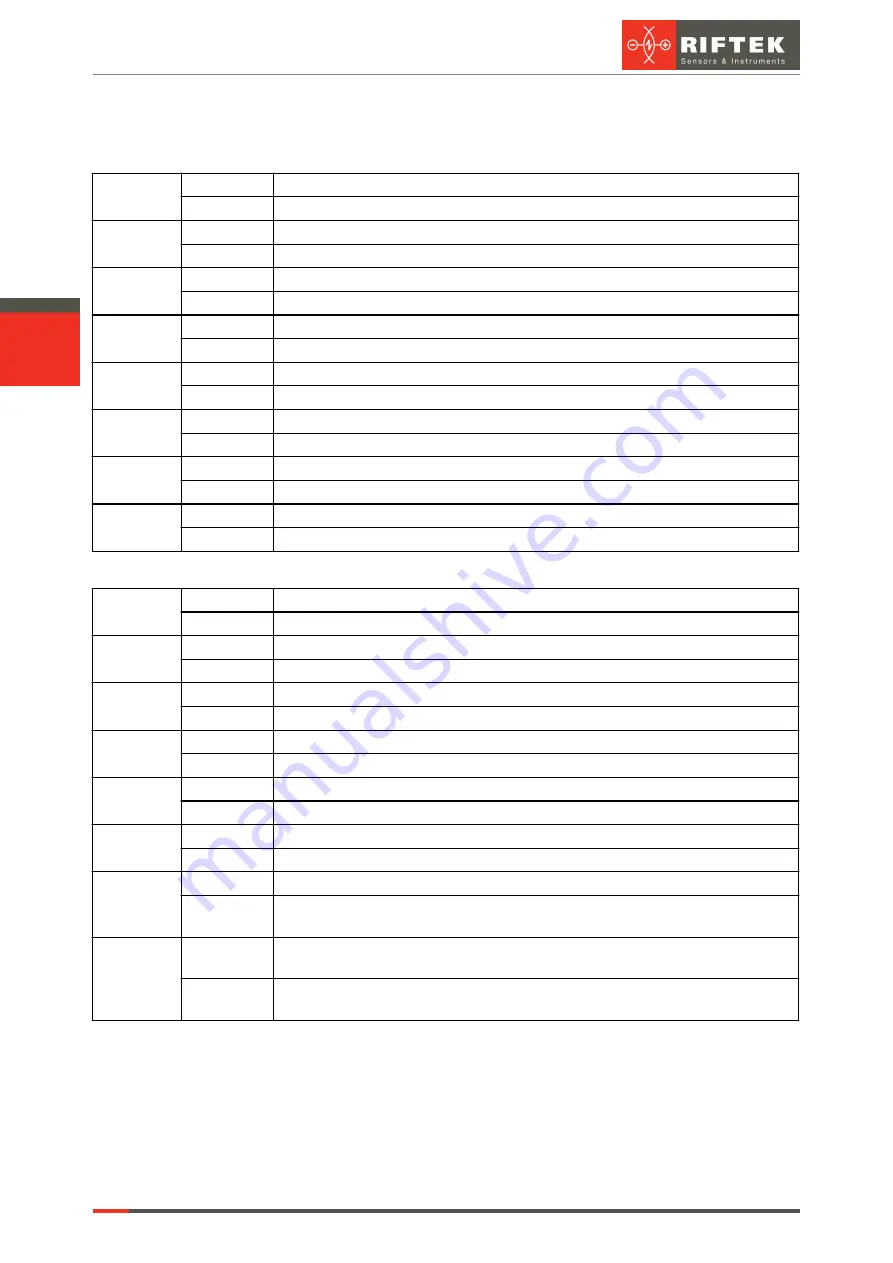
15.6.6.2. Holding registers
Read holding registers:
16 bit
15 bit
Scanner 3D Point X * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Scanner 3D Point Y * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Scanner 3D Point Z * 10 (absolute value).
1 bit
Least significant bit.
16 bit
8 bit
The latest counter that was received from the robot (unsigned).
8 bit
Reserved.
16 bit
15 bit
Robot P * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Robot R * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Scanner 2D Point X * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Scanner 2D Point Y * 10 (absolute value).
1 bit
Least significant bit.
Write holding registers:
16 bit
15 bit
Robot X * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Robot Y * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Robot Z * 10 (absolute value).
1 bit
Least significant bit.
16 bit
8 bit
Robot W * 10 (absolute value).
8 bit
Least significant bit.
16 bit
15 bit
Robot P * 10 (absolute value).
1 bit
Least significant bit.
16 bit
15 bit
Robot R * 10 (absolute value).
1 bit
Least significant bit.
16 bit
8 bit
Packet counter (unsigned).
8 bit
Command (unsigned): 0 - no command, 1 - laser ON, 2 - laser OFF. If the
command is the same as previous, nothing will happen.
16 bit
8 bit
Template set selection (unsigned): 0 - Measurement, 1 - Welding. If the
template set number is the same, nothing will happen.
8 bit
Template selection (unsigned). If the template number is the same, nothing will
happen.
15.6.6.3. Operation logic
1) The robot writes at least six registers (will be taken only six, starting with zero) by
six coordinates in the following format: 15 bit - value, 1 least significant bit - sign. The float
value transmitted by the robot will be multiplied by 10 in order to contain 1 digit after the
point.







































































