























Order Number
40 MHz No. F4044
FC-16 Boat `n Truck
13
16. FAILSAFE ADJUSTMENT (F/S) (ONLY IN PCM)
In the case of a loss of signal in the Tx to Rx radio link, there are
two alternative settings for the failsafe.
1 “NOR” (Normal) or hold mode
The Rx will hold the control setting from the last good trans-
mission signal. All the servos will remain held in their last good
position until reception of the Tx signal is re-established.
2 ( F/S) Failsafe position
In this setting, the throttle servo will move to a pre-programmed
position, which has been previously stored by the Rx. The fac-
tory pre-set position of 20% is active unless programmed dif-
ferently.
To navigate within the F/S menu.
The throttle channel will flash in the left hand side of the display.
Using the “+ or –“ keys you can select between Hold and Failsafe
modes.
NOR- (Hold) mode
= press up (+)
F/S- mode
= press down (-)
An arrow highlights the chosen option.
If you would like to set a failsafe posi-
tion for throttle channel (3), move the
throttle stick to the desired position
and press the (-) key for 2 seconds. A
beep will signify that the new position
has been stored and the percentage
stored will now be shown in the dis-
play.
To test the setting, switch Tx off, the throttle servo (channel 3) will
adopt the programmed failsafe position.
If using an i.c. motor; don’t set the F/S throttle value too low,
otherwise the motor may stop.
NOTE:
For certain slow moving models, using the Normal- (Hold) mode
will be sufficient.
In addition, the “Battery Failsafe” function is available when the
F/S mode is selected.
As soon as the Rx battery voltage falls below a value of 3,8V, the
throttle servo will move to its pre-set position, indicating to the
driver that the battery is nearly fully discharged.
Operation of the model must cease immediately this warning is
given. If you need throttle to return the model to you, closing the
throttle stick and re-opening will give throttle control to move it to
a safe position for recharging. You now have 30 seconds to do
this before the battery failsafe re-occurs if the voltage situation
has not improved.
The function works also for speed controllers connected to chan-
nel 3.
17.
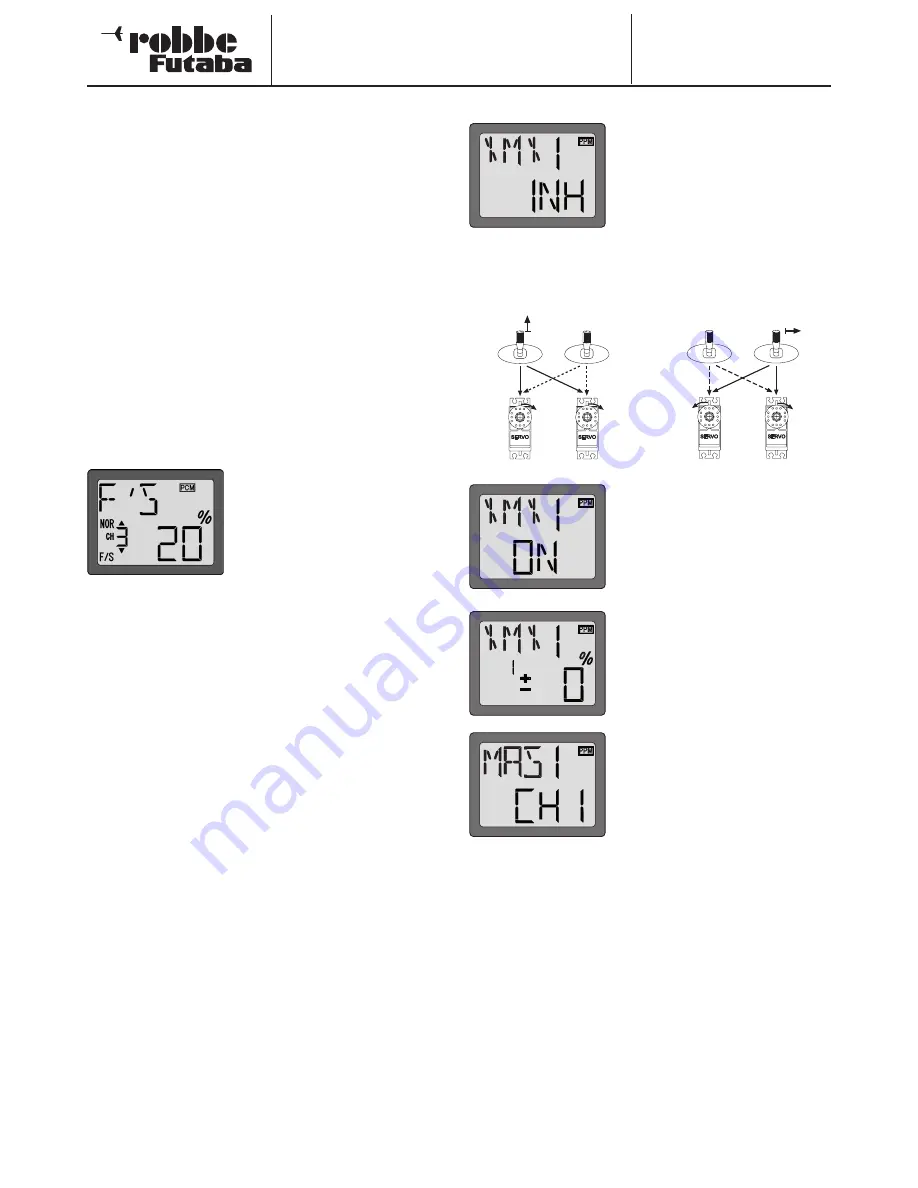
CROSS MIXER (XMX 1-2)
This mixer, known as a cross mixer
(XMX1-2) couples two separate Rx
output channels which need to be con-
trolled by two individual Tx controls.
(E.g. combined steering and throttle).
The Tx software contains two freely programmable cross mixers
(XMX1-2) for the user. Therefore, Tx inputs 1-8 can be used as
controls of these mixers.
Sustained pressing of the “+” key swit-
ches the mixer (ON). (The % symbol
will flash in the display, indicating that
channel 1 can be adjusted).
Page through with the cursor key until
“XMX1” appears. The mix value (%)
for control 1 can now be adjusted.
Further pressing of the cursor will take
you to control 2, where similarly, the
mix % can be adjusted.
Continue pressing cursor until “MAS1”
appears. The mix value for control
“1” (%) can be set here for any of the
channels (1-8). The same procedure
is followed for “MAS2” values, which
can be similarly adjusted in the menu.
In order to ensure that the servos move “together” or in “opposi-
tion” to achieve the desired control sense (and dependent on the
installed position of the servos), it may be necessary to reverse
their directions or change the mixer direction. Begin with rever-
sing servo on the throttle function to get both servos working in
the same sense.
This cross mixer is ideal for mixing throttle and steering functions
required in tracked vehicles and twin engine marine craft. In these
cases, it is usual to have throttle (3) and steering (1 or 4) mixed
at 100 % for each channel.







































































