





























51
3. Zero Position Adjustment
Zero position is robot standard posture information in order to know the difference of each robot basic posture.
Every robot basic posture would be different a little because every smart servo has own tolerance. For instance,
‘A’ robot motion would play a little bit different in ‘B’ robot because of smart servo tolerance. This difference
can be reduced as you ajdust “zero position adjustment”.
<RQ-HUNO zero position adjustment?
i)
Prepare “zero position tool”.
ii)
Fix Front Horn with zero position tool by using 2s rivets.
iii)
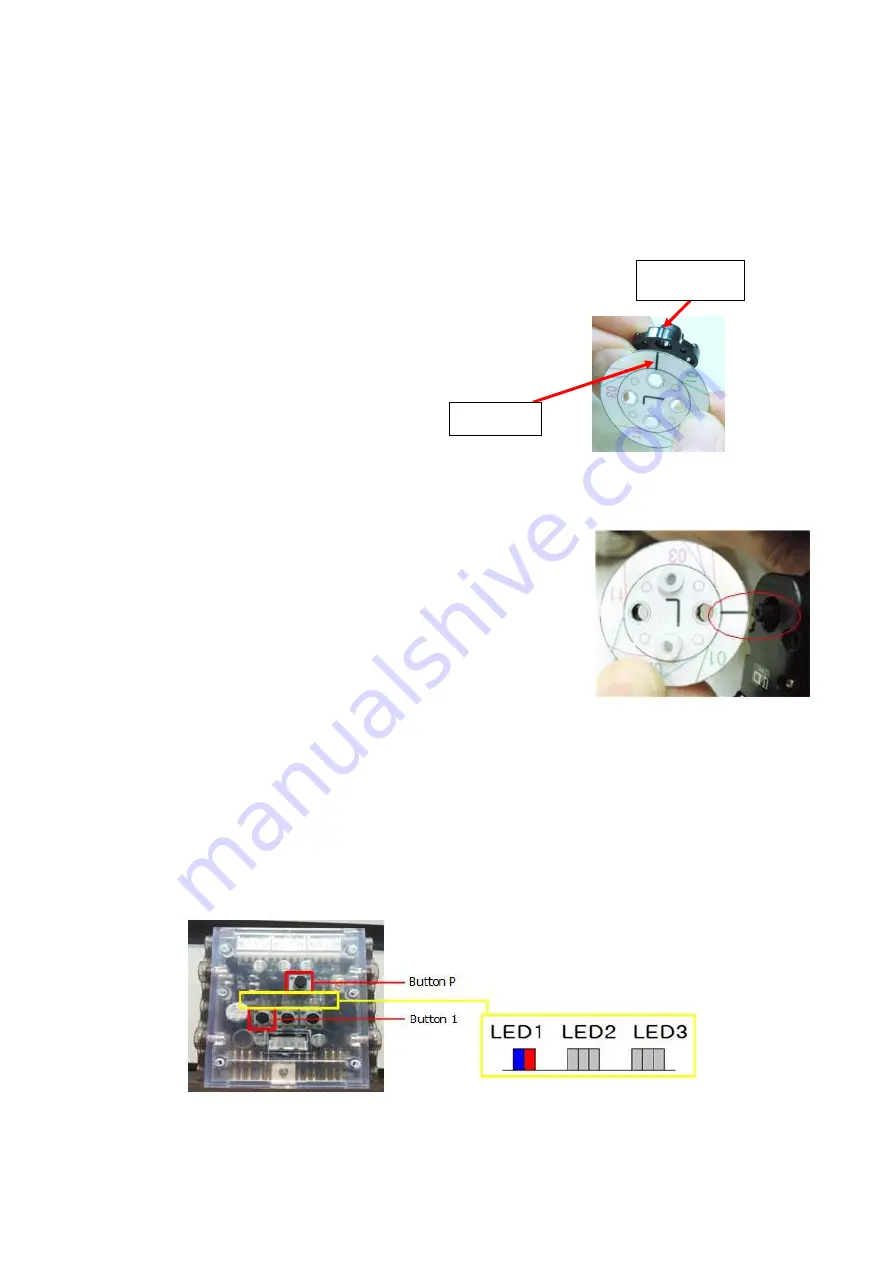
Put FrontHorn into smart servo to be adjusted. Stand line and FrontHorn mark should be matched
as the below.
‘L’ mark zero position tool is to adjust robot “left arm” and “left leg”.
‘R’ mark zero position tool is to adjust robot “right arm” and “right leg”.
iv)
Make power-off the smart controller.
v)
Press button P while button 1 pressed.
ð
LED 1 blue and red LED lights, also, smart servo ID00 blue LED lights.
(Zero position adjustment starts from smart servo ID00.)
standard line
FrontHorn mark
Summary of Contents for RQ-110
Page 1: ......
Page 12: ...12 1 3 Rivet Tool Rivet Tool Usage ...
Page 13: ...13 ...
Page 14: ...14 ...
Page 15: ...15 ...
Page 31: ...31 STEP4 Connect Joint Frame that connected with ID14 and ID15 by using 3s rivet ...
Page 34: ...34 STEP4 Connect Joint Frame that connected with ID14 and ID15 by using 3s rivet ...
Page 54: ...54 3 Click Next and finish the installation as shown in the below ...
Page 60: ...60 Screen Layout This is the screen layout of the MotionBuilder ...
Page 61: ...61 ...
Page 89: ...89 8 3 How to charge ...































































