


















23
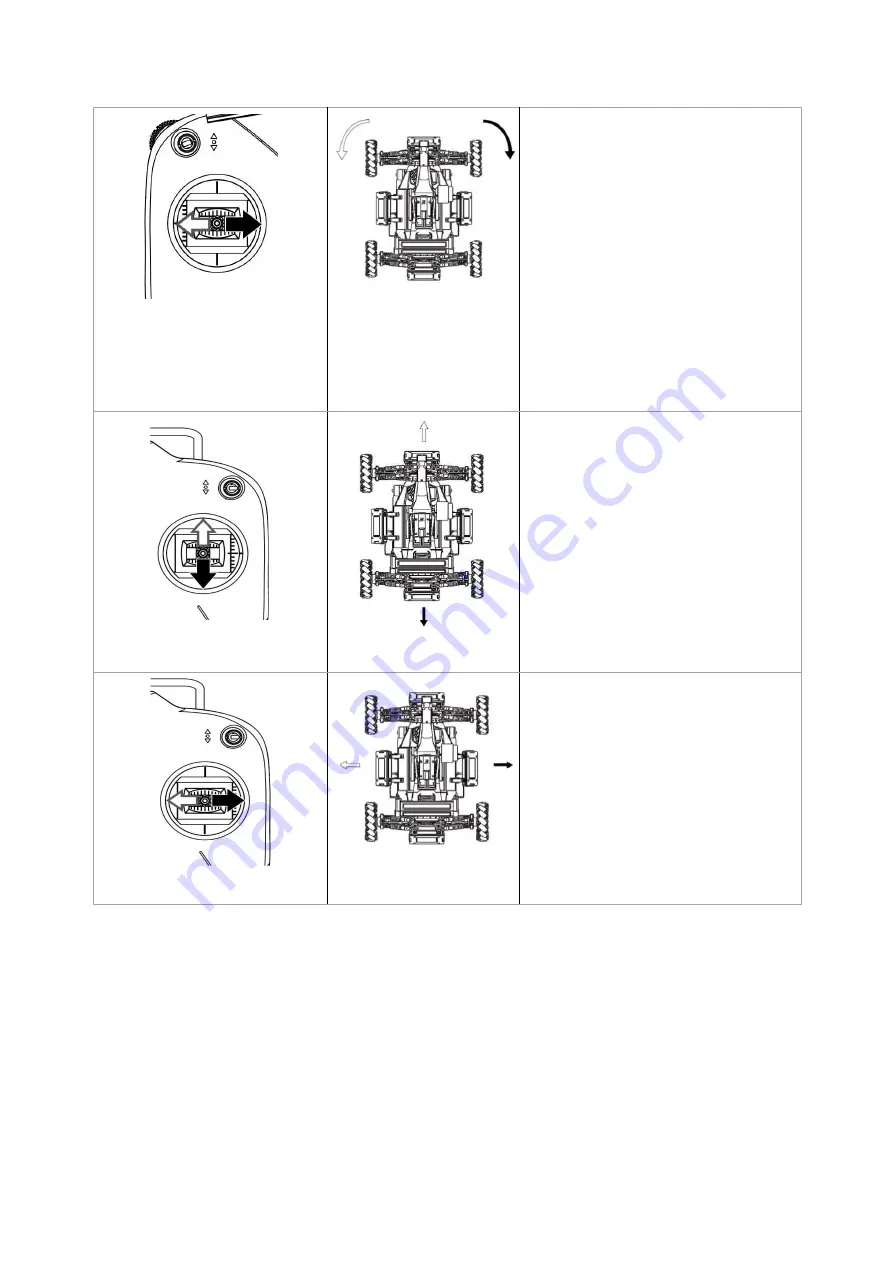
Determine whether the chassis is rotating
according to the gimbal’s yaw axis or the
gimbal’s yaw axis is rotating according to
the chassis based on the position of S1.
When the joystick is pushed to the left, the
robot rotates anticlockwise; when the
joystick is pushed to the right, the robot
rotates clockwise; when the joystick is in
the middle position, the robot remains
stationary.
When the joystick is pushed up, the robot
moves forward; when the joystick is
pushed down, the robot moves backward;
when the joystick is in the middle position,
the robot remains stationary.
When the joystick is pushed to the left, the
robot makes a parallel left shift; when the
joystick is pushed to the right, the robot
makes a parallel right shift; when the
joystick is in the middle position, the robot
remains stationary.
The operation methods for the above operating modes are the official definitions. You can customize them to meet your
requirements.







































































