




























RS-Helios-1610 User Manual
17
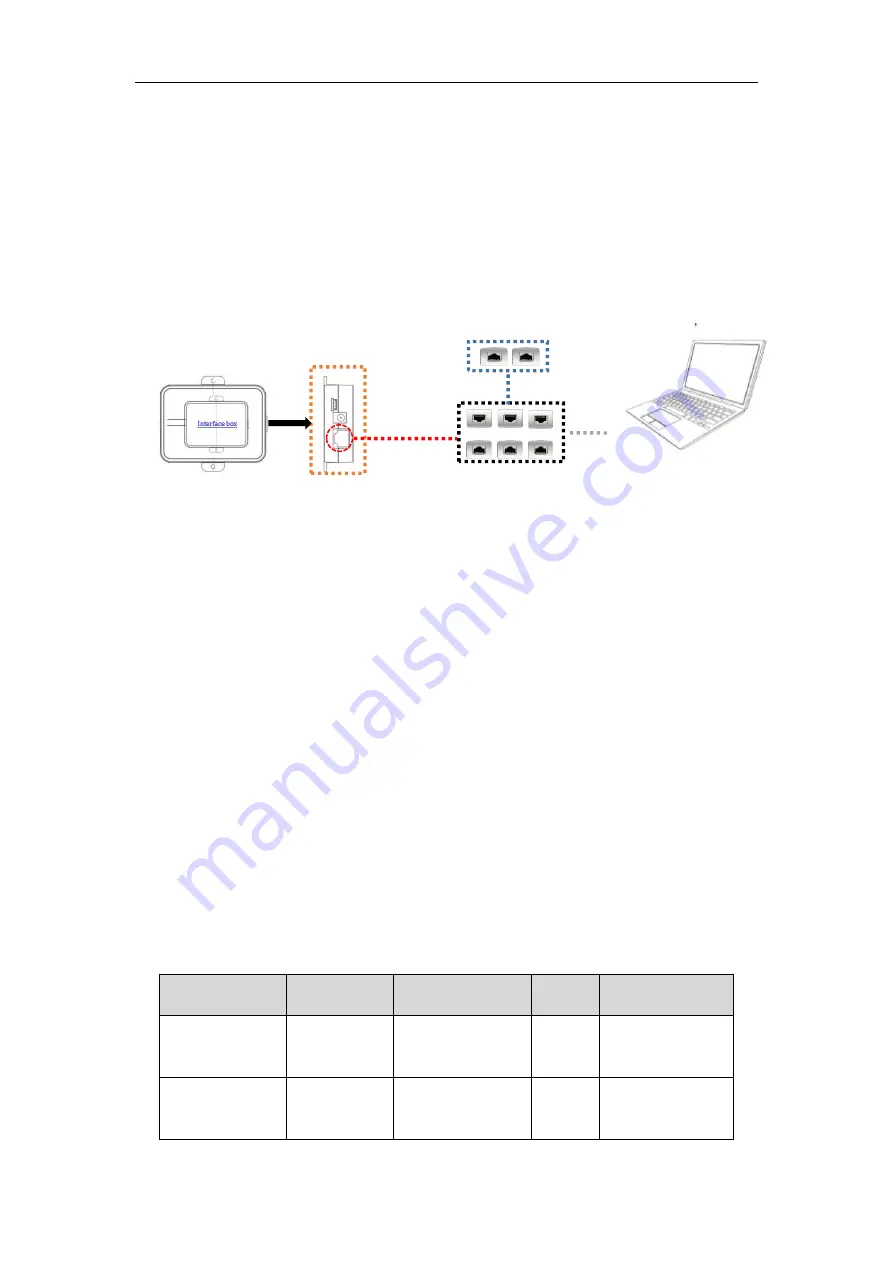
5.6.4 PTP wiring Method
To use the PTP synchronization method, you need to make the following preparations, and then
connect according to the connection method shown in the figure below:
1) Select PTP mode in the web interface (please see Appendix A.2 Web Interface configuration);
2) Prepare a PTP Master timing host (plug and play, no additional configuration required);
3) Ethernet switch;
4) Device supporting PTP protocol
Figure 10 PTP Connecting Diagram
Note
:
1. The PTP Master timing equipment is a third-party equipment that needs to be purchased by the user
independently, which is not included in the RoboSense standard product shipping package.
2. As a PTP Slave device, our LiDAR only obtains the time sent by the PTP Master, and does not make accuracy
judgments. If the time of the LiDAR deviates from the real time, please check whether the time provided by the
PTP Master is accurate;
3. After the LiDAR is synchronized, the PTP Master is disconnected, and the time in the point cloud data packet
will be superimposed according to the LiDAR's internal clock, and it will be reset after the LiDAR is powered off
and restarted.
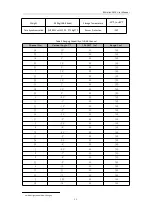
6 Communication Protocol
The communication between RS-Helios-1610 and computer is through Ethernet and by sending
UDP packets. There are mainly two types of communication protocols, as shown in the following
table:
Table 8 Communication Protocols
Protocol
Abbreviation
Function
Type
Packet Size
Main data Stream
Output Protocol
MSOP
Output measured
data
UDP
1248 bytes
Device Information
Output Protocol
DIFOP
Output sensor
information
UDP
1248 bytes
PTP Master (third party)
Ethernet Switch
LiDAR Configuration Box







































































