




























RS-Helios-1610 User Manual
23
15
Web page cgi backup CRC
79
4
16
Ethernet gateway
83
4
17
Subnet mask
87
4
18
Reserved
91
201
19
Serial number
292
6
20
Zero angle offset
298
2
21
Return mode
300
1
22
Time Synchronization Mode
301
1
23
Synchronization status
302
1
24
Time
303
10
25
Operating status
313
12
26
Reserved
325
17
27
Fault diagnosis
342
18
28
Whether the code wheel is calibrated
360
1
29
GPS PPS pulse trigger mode
361
1
30
Reserved
362
20
31
GPRMC
382
86
32
Corrected vertical angle
468
96
33
Corrected horizontal angle
564
96
34
Reserved
660
586
Tail
35
Tail
1246
2
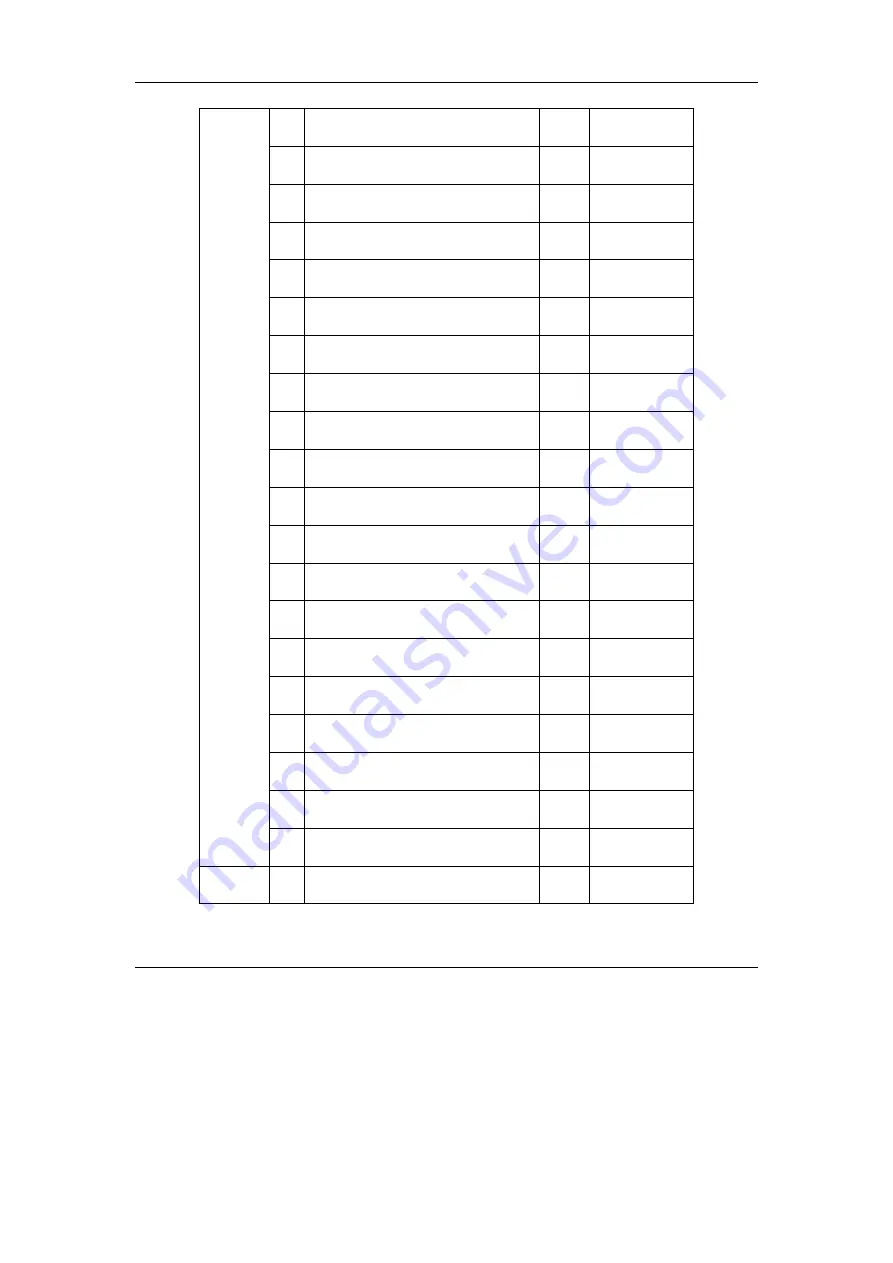
Note: The Header (the DIFOP identifier) in the table above is 0xA5,0xFF,0x00,0x5A,0x11,0x11,0x55,0x55, it can be
used to identify the packet. The tail is 0x0F,0xF0.
For detailed definition of information registers as well as their usage, please refer to Appendix B
of this user manual.



































































