





























Robotiq 2-Finger Adaptive Robot Gripper - 200
Instruction Manual
Robotiq inc. © 2008-2013
32
CANopen communication protocol
The CANopen communication is established via the Communication Panel pin-out.
shows the pin-out
for the CANopen communication protocol for the receptacle (DB-9 male) present on the 2-Finger Adaptive Robot
Gripper – 200.
Caution
There is no terminating resistor mounted in the Gripper.
The shield of the cable must be grounded in the robot controller.
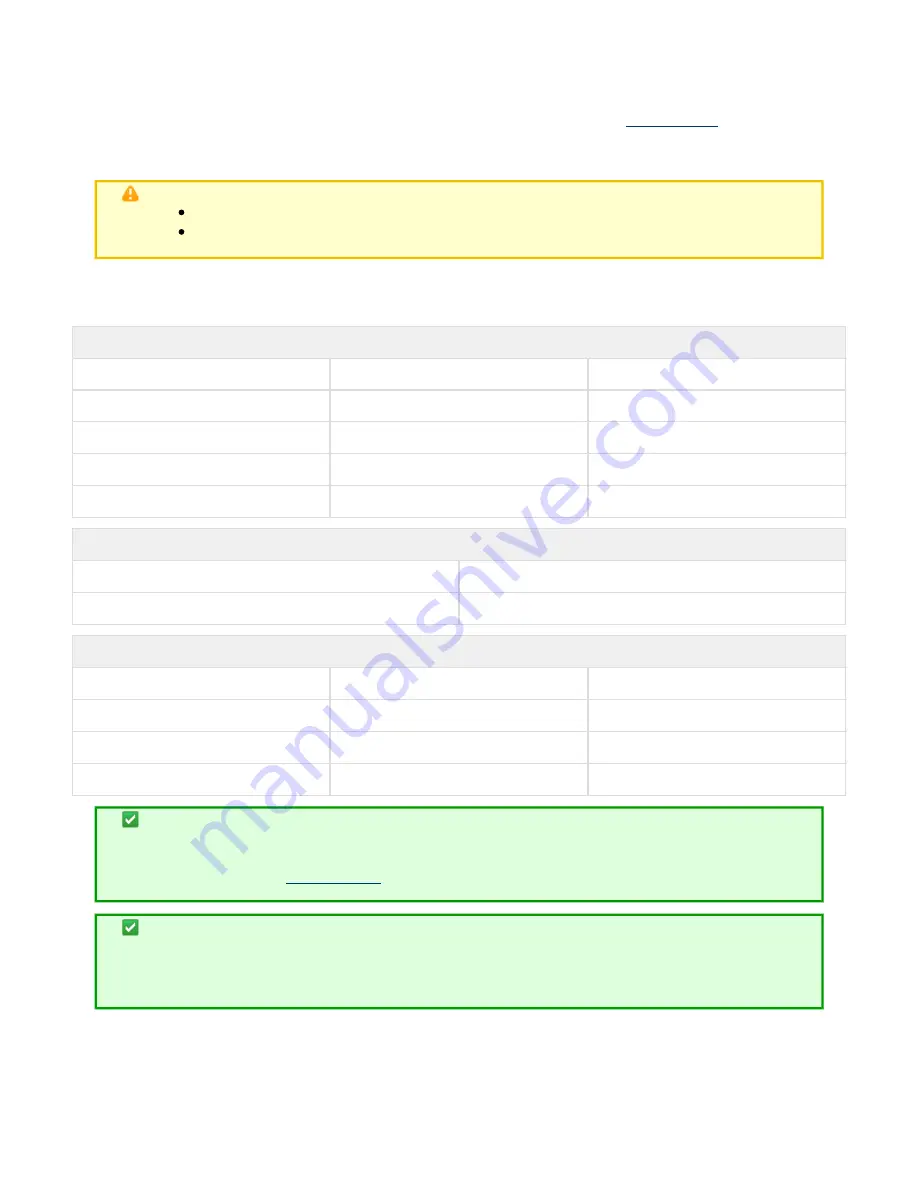
Factory settings for CANopen protocol:
IDENTIFICATION SETTINGS
Info
Decimal value ( base 10 )
Hexadecimal value ( base 16 )
Vendor ID :
68
0x00000044
Product Code :
1541540
0x001785A4
Revision Number :
131072
0x00020000
Serial Number :
0
0x00000000
BUS SETTINGS
Node Adress :
11
Baud Rate :
1 MBaud
DATA SETTINGS
Index
Size
Send Object :
0x2000
128
Receive Object :
0x2200
128
Output Databytes :
512
Hint
Node Address settings and Baud Rate settings can be set on the Robotiq Controller using the
Robotiq UI. See the
Hint
The CANopen communication interface supports SDO (Service Data Object) and PDO (Process
Data Object) protocols.
































































