





























Robotiq 2-Finger Adaptive Robot Gripper - 200
Instruction Manual
Robotiq inc. © 2008-2013
34
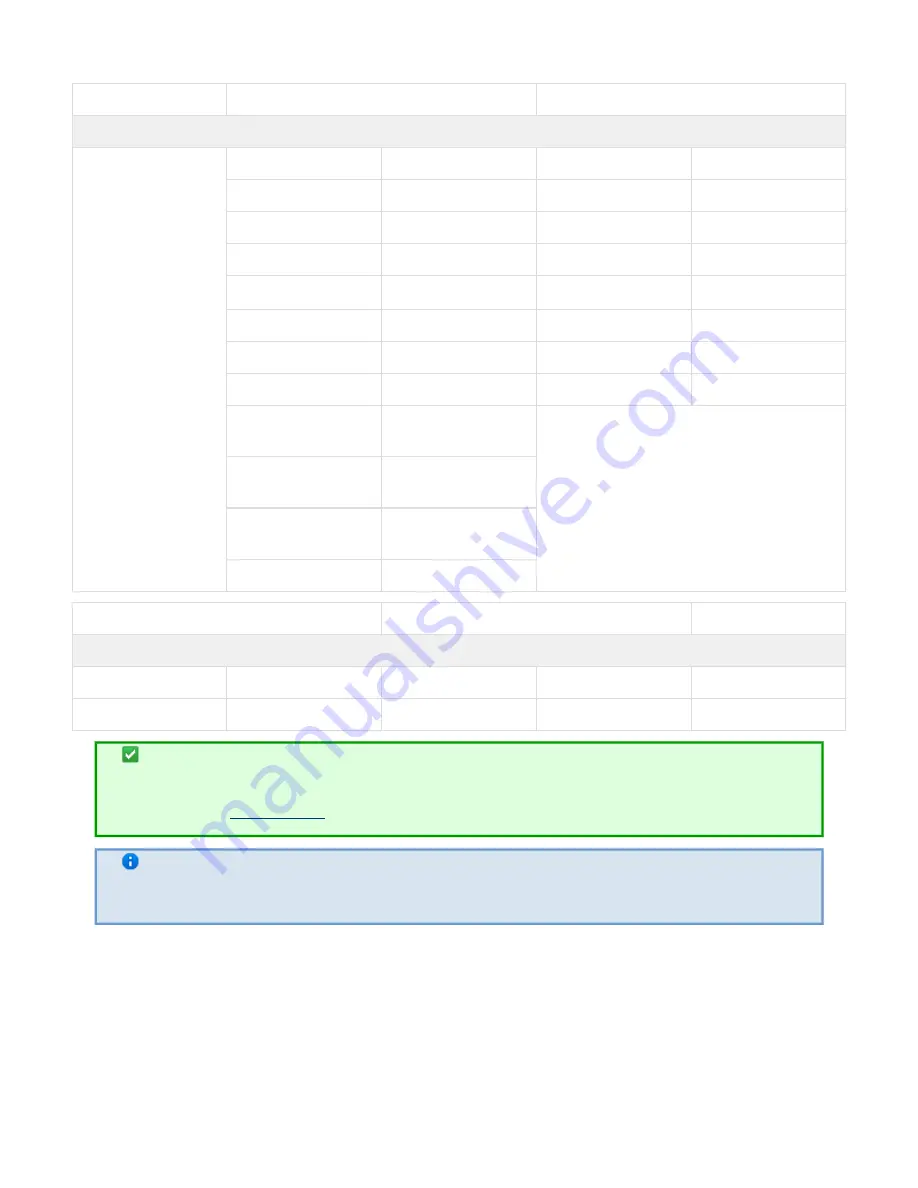
EtherCAT
EtherNet / IP
Modbus TCP/IP
BUS SETTINGS
N / A (see info note)
IP Address :
192.168.1.11
IP Address :
192.168.1.11
Netmask :
255.255.255.0
Netmask :
255.255.255.0
Gateway :
Disabled
Gateway :
Disabled
BootP :
Disabled
BootP :
Disabled
DHCP :
Disabled
1
DHCP :
Disabled
1
100Mbit :
Enabled
100Mbit
always on
Full Duplex:
Enabled
Full Duplex
always on
Auto-neg :
Enabled
Auto-neg
always on
Assembly Instance
(input) :
101
Assembly Instance
(output) :
100
Configuraton
Instance :
1
Connection Type :
Run/Idle Header
EtherCAT
EtherNet / IP
Modbus TCP/IP
DATA SETTINGS
Input Data Bytes :
6
Prod. Data Length :
10
N / A
Output Data Bytes :
6
Cons. Data Length :
10
N / A
Hint
IP Address settings and Netmask settings can be set on the Robotiq Controller using the Robotiq
UI. See the
Info
EtherCAT protocol uses inherent dynamic addressing thus bus settings cannot be customized.






























































