


























2F-85 & 2F-140 - Instruction Manual
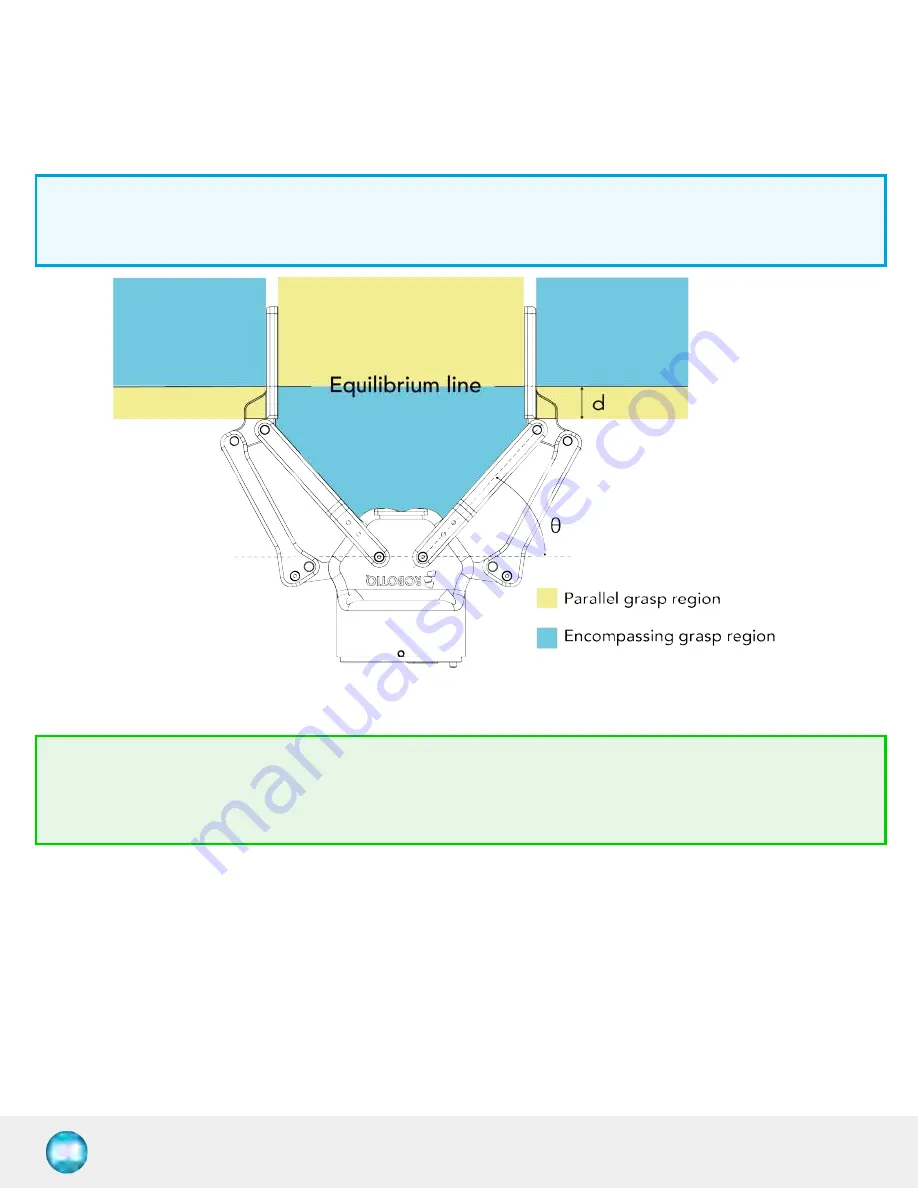
The gripper equilibrium line is the grasping region that separates the encompassing grasp from the parallel grasp. When grasping
an object close enough to the inside (palm) of the gripper, the encompassing grasp will occur (unless the object size or shape is
not adequate) and the fingers will close around the object.
If grasped above the equilibrium line, the same object will be picked up in a parallel grasp by the fingertips and the fingers will
close with a parallel motion. The figure below shows the encompassing grasp region, the equilibrium line, and the parallel grasp
region on the 2-Finger Adaptive Gripper.
Info
The details of the equilibrium line relation between opening angle and the related position d can be found in the
Mechanical specifications section.
Fig. 1-5: Equilibrium line on the 2-Finger.
Tip
Grasping an object that could be grasped by an encompassing grasp (a cylinder for example) on the equilibrium line is
not recommended, as slight variations on the position will switch the grasp from parallel to encompassing and vice
versa. Robot programming should be done so that the grasping mode will be predetermined.
11




































































