



























2F-85 & 2F-140 - Instruction Manual
5.2.3. Center of mass, tool center point and moment of inertia
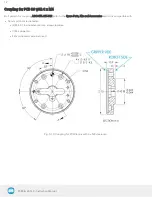
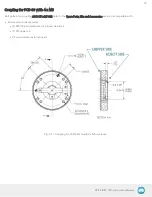
When grippers are not mounted on the Wrist Camera, a coupling is included. A dual gripper adapter plate is included when
required.
Products
Center of mass (mm)
TCP (mm)
Mass
(g)
X
Y
Z
X
Y
Z
2F-85
0.0
0.0
60.0
0.0
0.0
174.0
921
2F-140
0.0
0.0
75.5
0.0
0.0
244.0
1013
Info
For TCP and center of mass of the 2F-85 or the 2F-140 used in combination with other Robotiq products, please consult
the specific table provided on our
.
Info
The angle to calculate the TCP for grippers mounted on a dual gripper assembly is as follows:
l
Rx = 0
l
Ry+/Ry- = 0.7854
l
Rz = 0
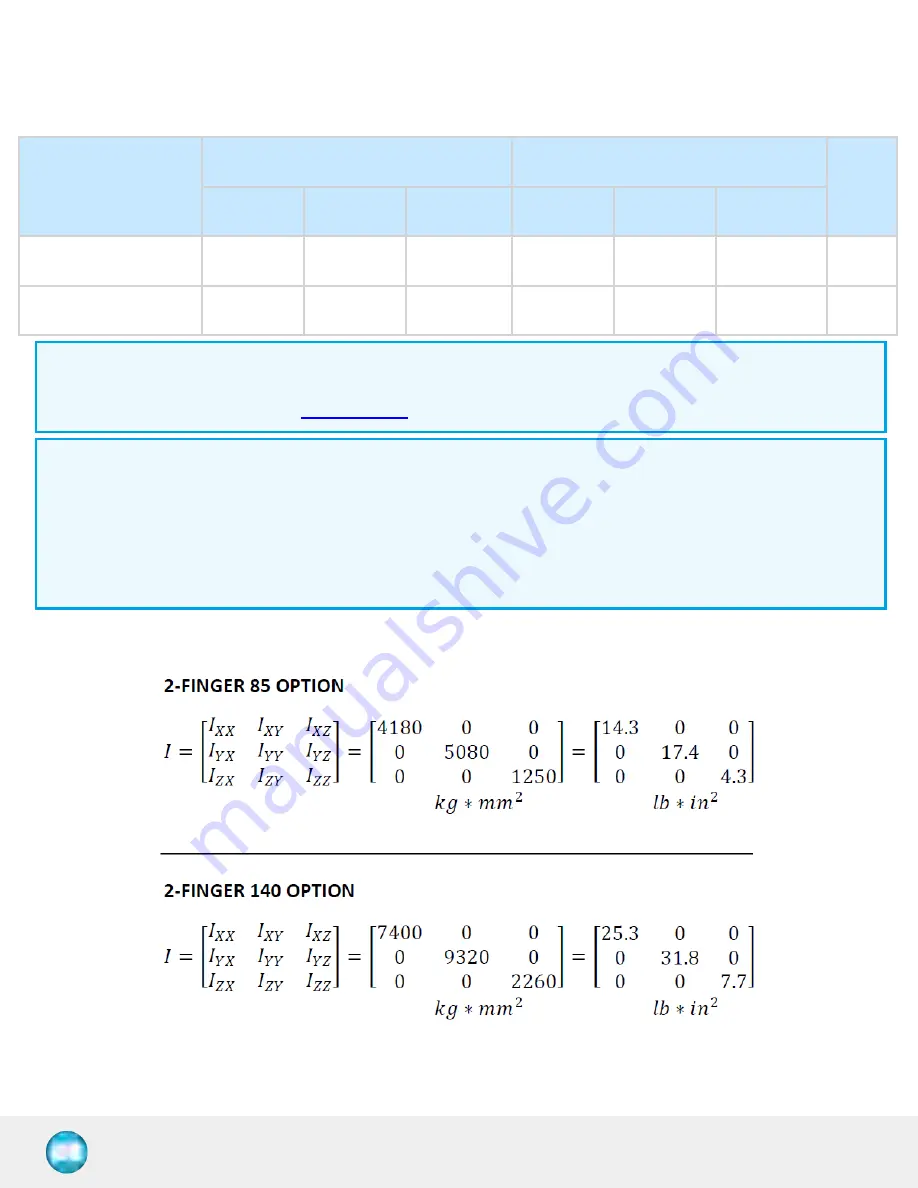
The moment of inertia are calculated for a configuration where the fingers are fully open. Here is the approximate moment of
inertia matrix for the gripper:
Fig. 5-20: Inertia matrix for Robotiq 2-Finger .
82

































































