




























3-Finger Adaptive Robot Gripper Instruction Manual
l
For each Operation Mode, the operator can control the force and the speed of the fingers.
l
Unless individual control is selected, the movement of the fingers is always synchronized, movement is done with a single "Go to requested
position" command (the motion of each mechanical phalanx is done automatically).
l
The Gripper must be initialized (activation bit) at power on. This procedure takes a few seconds and allows the Gripper to be calibrated
against internal mechanical stops.
The 3-Finger Gripper returns several registers of information to the robot controller to be read, this is called
Input Registers & Status
, see Robot
input registers & status for details:
l
Global Gripper Status
- A global Gripper Status is available. This gives information such as which Operation Mode is currently active or if the
Gripper is closed or open.
l
Object Status
- There is also an Object Status that let you know if there is an object in the Gripper and, in the affirmative, how many fingers are in
contact with it.
Hint
l
Object status is a built in feature that allows for object pick-up detection, see Robot input registers & status for details.
l
Fault Status
- The Fault Status gives additional details about the cause of a fault.
l
Position Request Echo
- The Gripper returns the position requested by the robot to make sure that the new command has been
received correctly.
l
Motor Encoder Status
- Information on the encoders for the four motors is also available.
l
Current Status
- The current of the motors can also be known. Since the torque of the motor is a linear function of the current, this gives
information about the force that is applied at the actuation linkage of the finger.
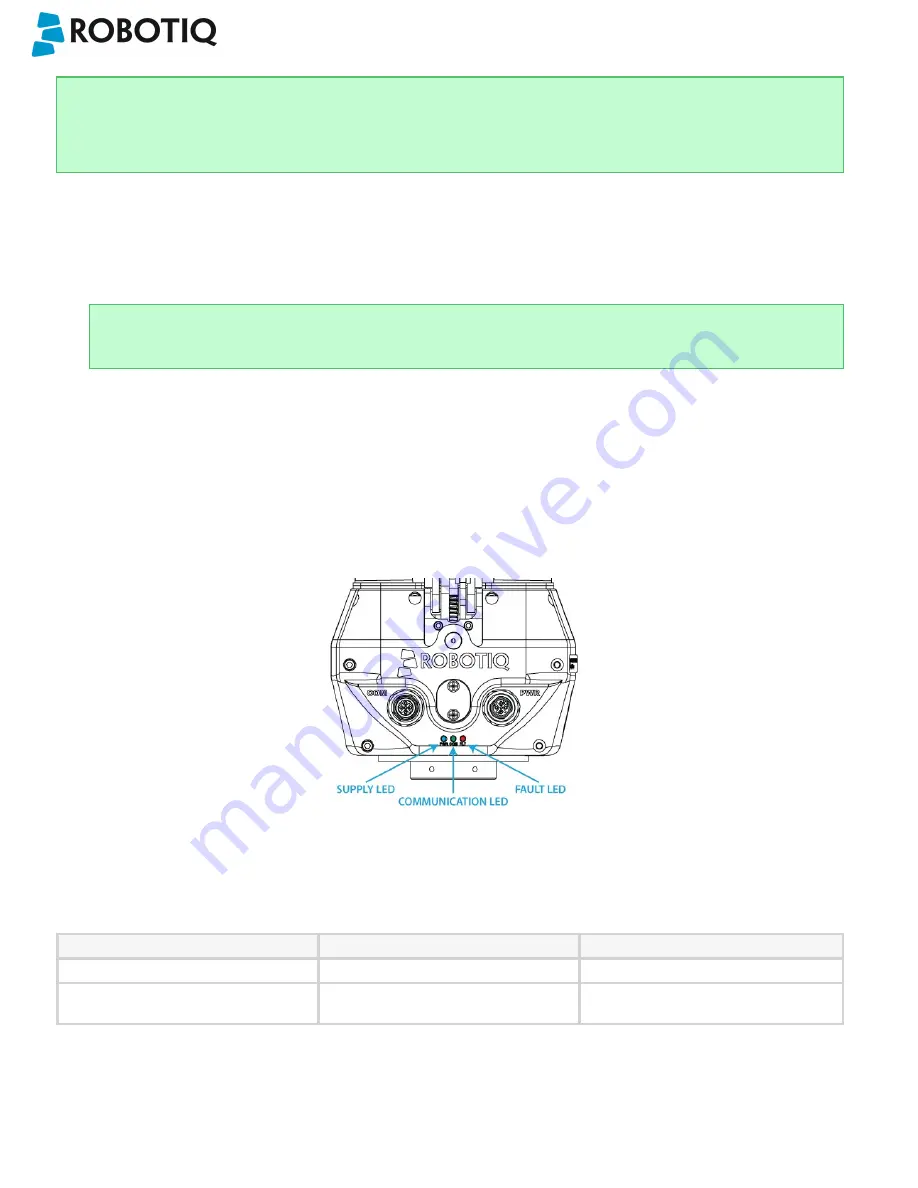
4.2 Status LEDs
Three status LED lights provide general information about the 3-Finger Adaptive Robot Gripper status. Figure 4.2.1shows the LEDs and
their locations.
Figure 4.2.1 : Status LEDs.
4.2.1 Supply LED
COLOR
STATE
INFORMATION
Blue
Off
Gripper is not supplied with power
Blue
On
The Gripper is correctly supplied and the
control board is running
4.2.2 Communication LED
©Robotiq inc. 2008-2018
32







































































