




























3-Finger Adaptive Robot Gripper Instruction Manual
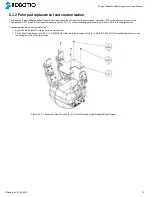
Features
Feature
Description
User input
Position
Gripper position requested
Integer value from 0 to 255
l
0 = Open
l
255 = Close
Speed
Gripper speed requested
Integer value from 0 to 255
l
0 = minimum
l
255 = maximum
Force
Gripper force applied by the Gripper
Integer value from 0 to 255
l
0 = minimum
l
255 = maximum
Basic
Operation mode in which all fingers of the Gripper close, with fingers B and C
remaining parallel.
Radio button
Pinch
Operation mode in which all fingers of the Gripper close, with fingers B and C
travelling one towards the other.
Radio button
Wide
Operation mode in which all fingers of the Gripper close, with fingers B and C
travelling away one from the other.
Radio button
Scissor
Operation mode consisting in the lateral move of fingers B and C, each one
towards the other, while finger A remains still.
Radio button
Complete gripper motion before
performing next action
If selected, the Gripper completes its motion prior to executing the next action
in the PolyScope program tree. Slower but safer action.
If NOT selected, as soon as the Gripper starts moving, PolyScope executes
the next action in the program tree. This allows the user to move the Gripper
and robot at the same time.
Checkbox
Go to position
Sends all node parameters (position, force and speed) to the Gripper; the
instruction is executed immediately.
Button
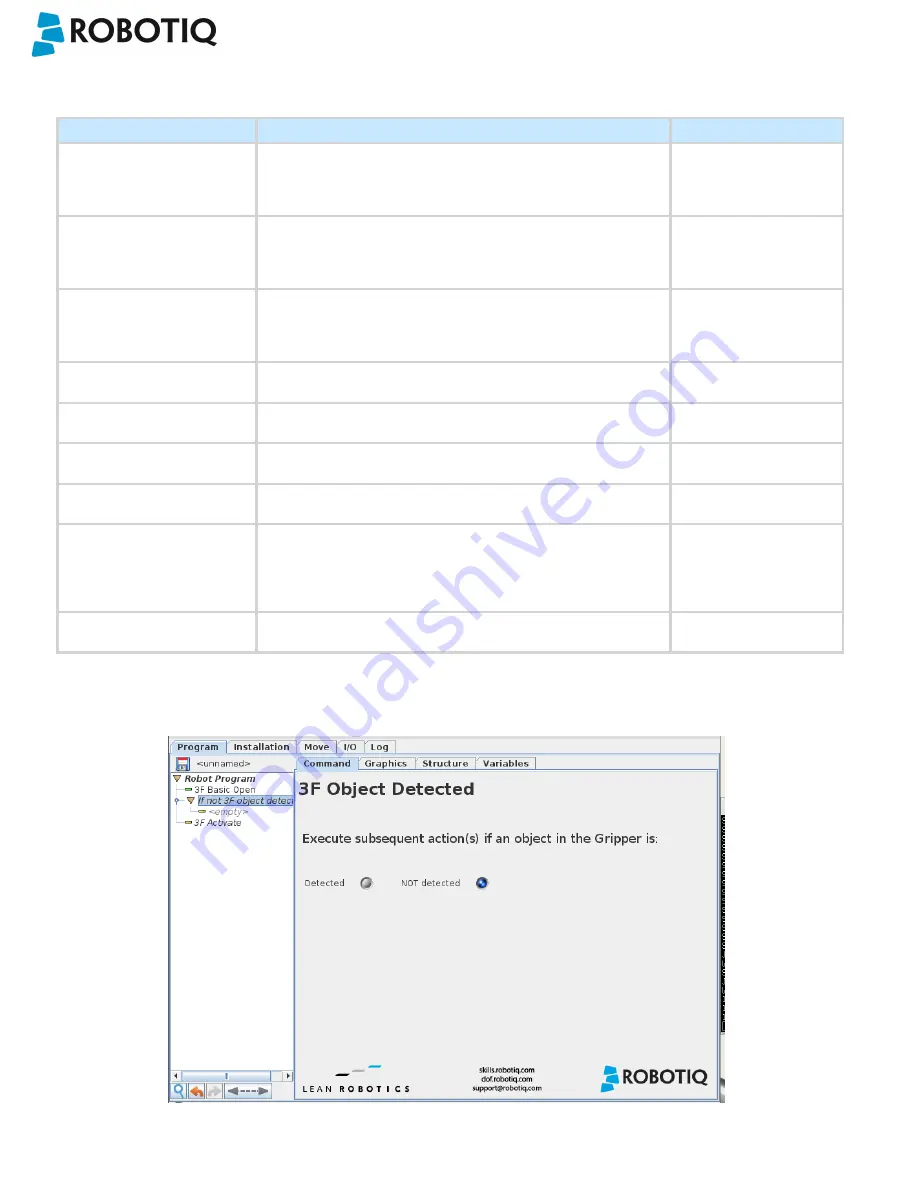
4.9.3 3F Object Detected node
©Robotiq inc. 2008-2018
64







































































