























3-Finger Adaptive Robot Gripper Instruction Manual
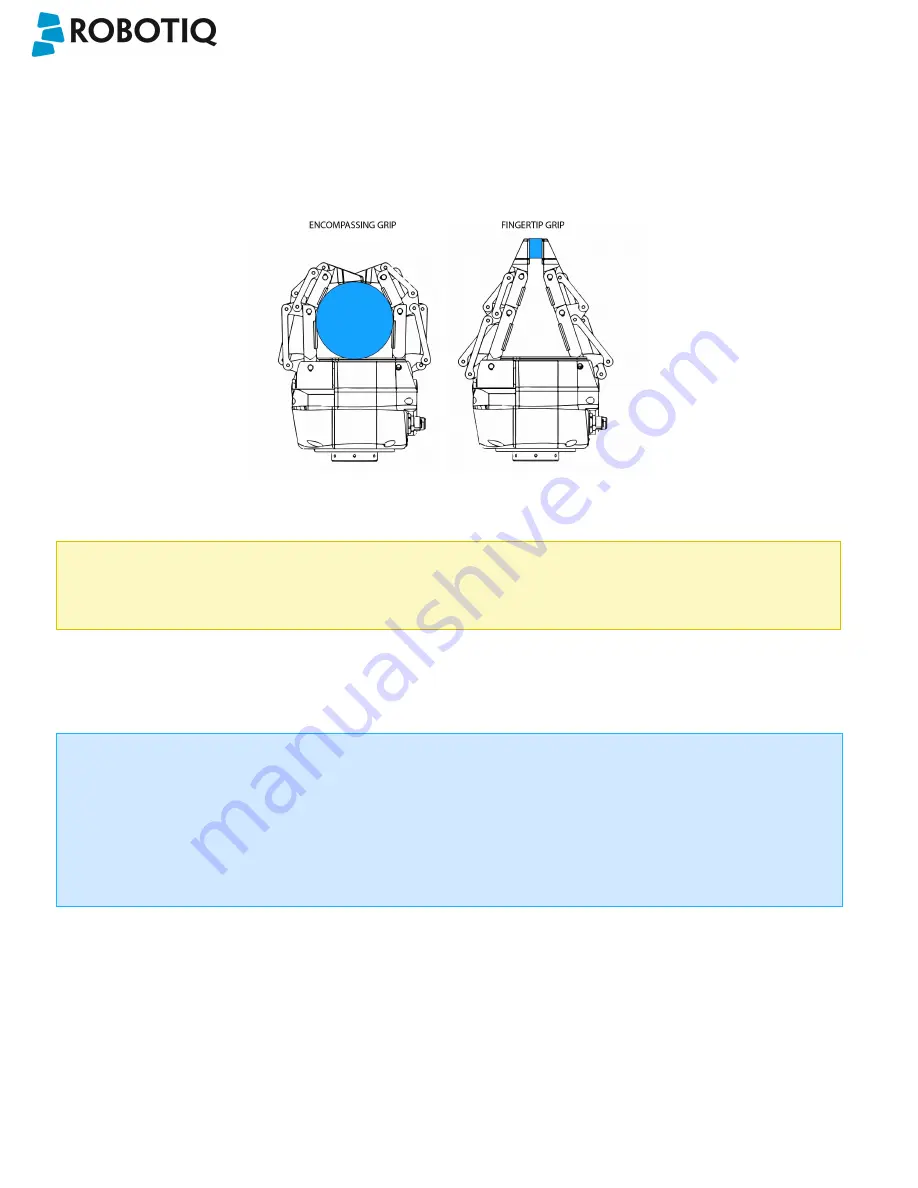
Two types of grips occur when closing the 3-Finger Adaptive Robot Gripper on an object: Fingertip Grip or Encompassing Grip.
l
The
Fingertip Grip
is when an object is only held by the distal phalanxes. This type of grip is similar to what is done with conventional industrial
parallel grippers. In this situation, the stability of the grip is maintained because of the friction between the fingers and the object.
l
The
Encompassing Grip
is when the fingers surround an object. The object is encompassed within the fingers and the stability of the grip is no
longer related to friction. We suggest using the Encompassing Grip whenever possible to increase grip stability.
Figure 1.5 shows the two types of grips.
Figure 1.5 : The Two Types of Grip, Encompassing and Fingertip Grips.
Caution
It is important to note that a parallel grip can only be performed when the fingers touch the object with the distal phalanxes first. Inversely, for an
encompassing grip, the fingers must touch theobject with the proximal or the lower section of the distal phalanxes first. Also, to ensure stability,
the object should be held against the Gripper palm when performing an encompassing grip.
Note that the Encompassing Grip cannot occur in all Operation Modes. For example, in Pinch and Scissor modes, it is only possible to do Fingertip
Gripping. On the other hand, the Fingertip Grip can occur in all four Operation Modes. Figure 1.6 summarizes the Types of Grip possible for each
Operation Mode.
Info
Operation Modes are inputs to the Gripper.
Whether the fingers close to produce an Encompassing or Fingertip grip is decided at
the Gripper level automatically
. It will depend on:
l
The Operation Mode;
l
The part's geometry;
l
The relative position of the part with respect to the Gripper.
In other words, picking the same part using the same Operation Mode could result in either an Encompassing or Fingertip Grip based on a part's
position and geometry.
©Robotiq inc. 2008-2018
9






























































