





























6-Point Path
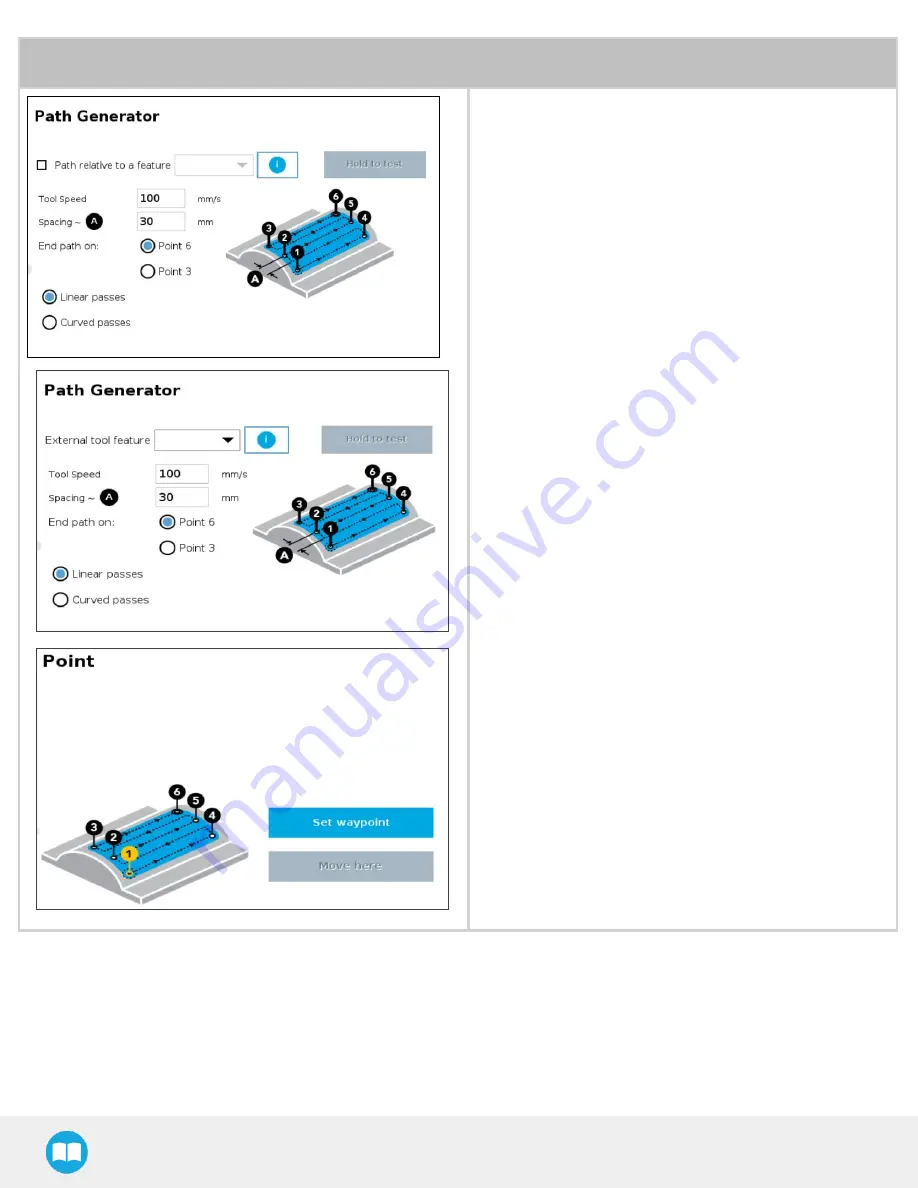
1. Define the six points that represent your surface.
2. Each point has its own node.
3. Choose Set Waypoint to define your waypoint (bring
the robot to where your corner is).
4. Make sure the point you are teaching fits the point
sequence on the illustration.
5. When it is defined, you can always move to the point
(click on move here) or change the waypoint (click on
Set waypoint).
6. Perform the same procedure for all six points. Make
sure the corner you are teaching fits the corners’
sequence on the illustration.
7. When all corners have been defined, go back to 6-
Point.
8. You can edit parameters (speed and distance
between passes).
9. You can also choose the final point of your trajectory.
o Note: the spacing you enter will not be applied exactly, it
will be rounded to fit the final point you decided.
10. Tap and hold the Hold to test button (that will be avail-
able) to try out and execute the trajectory without hav-
ing to run the entire program.
l
Note: this will make your robot move, make sure
its workspace is clear.
You can decide if you want to do linear or curved passes.
The illustration will show you the one you selected.
59

































































