





























Robotiq Finishing Kits- Instruction Manual
3
Stiffness: the stiffness settings act directly on the Sensor's directional compliance depending on the orientation of the end-
effector and the axes selected at step 1.
a
A stiffness value closer to 0% will provide greater compliance along/around the corresponding axis
b
A stiffness value of 100% offers no compliance along/around the corresponding axis
4
Deviation range: the deviation range limits the flexibility allowed along/around the corresponding axis.
a
The deviation range along the X, Y and Z axes is measured in millimeters (mm) – the negative range allowed goes
from -1000 mm to 0 mm while the positive range allowed goes from 0 mm to 1000 mm.
b
The deviation range around the X, Y and Z axes is mesured in degrees (°) – the negative range allowed goes from -
179° to 0° while the positive range allowed goes from 0° to 179°.
Example
In a situation where 10 N are applied exclusively along the Z-axis, with 20% stiffness along the X and Y axes, and a
deviation range that goes from -50 mm to +50 mm along all axes...
l
The end-effector will systematically point towards its Z-axis
l
The end-effector will not rotate around Rx, Ry and Rz (no torque feeding)
l
The end-effector will be moderately flexible to move along the X and Y axes
l
The movements along the X, Y and Z axes will be limited to -50 mm and +50 mm from the command position
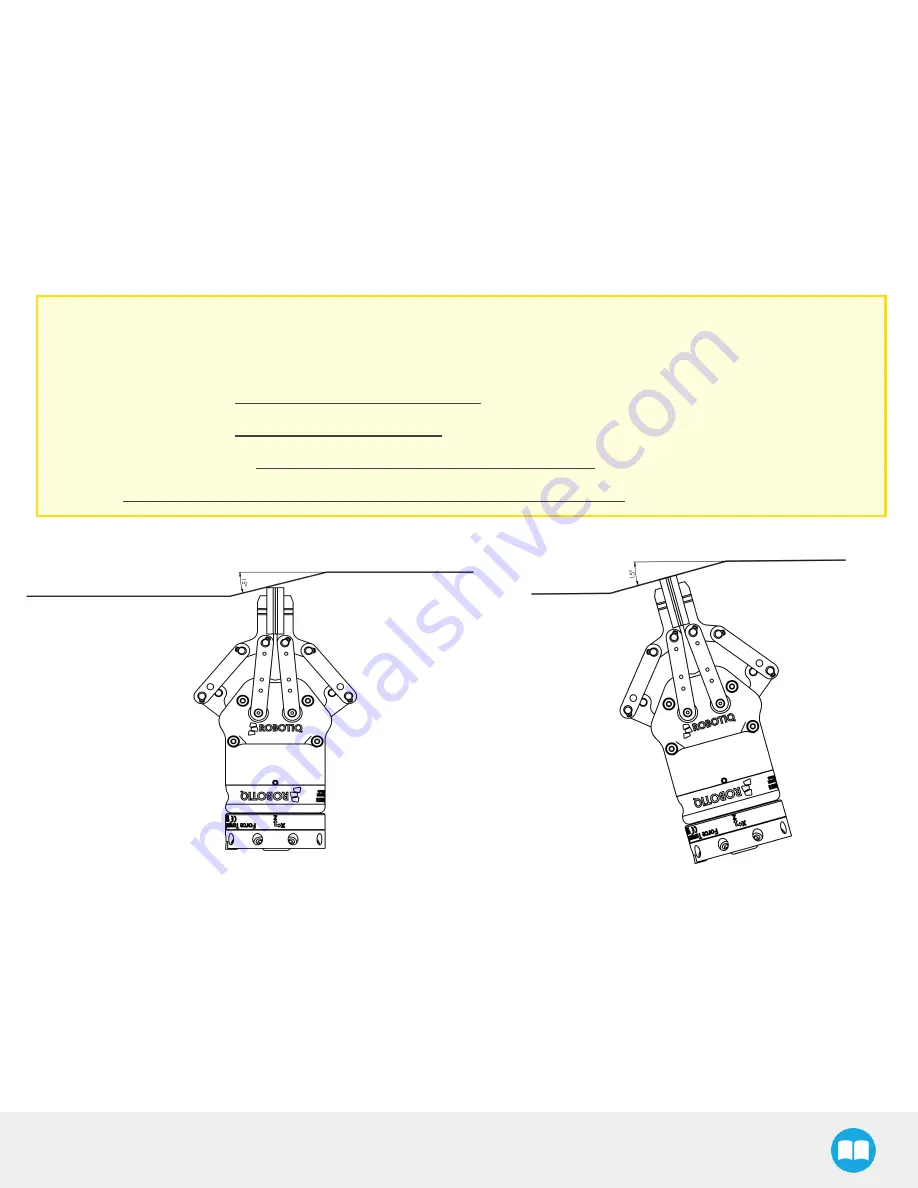
Fig. 4-19: Deviation range - On the left, no deviation range has been entered. On the right, a deviation range of at least 15 degrees
has been entered around the corresponding axis.
5
Enable adaptive stiffness: this checkbox greys out the stiffness values in the boxes at step 3 since the Force Control cal-
culates the rigidity of the surface/object with which the end-effector comes in contact. Thus, constant force/torque values
are applied to surfaces with variable rigidity (e.g.: long, bent, bending or folded sheets or parts).
When entering into contact with a surface for the first time, the end-effector will pull back for it has reached the force/torque
value entered at steps 2a and/or 2b. It will then go back to the surface and apply the same force/torque values while pulling
back less and less over time.
70






























































