
























1.2. Robotiq Finishing Copilot software on e-Series robots
The Robotiq Finishing Copilot is a software package designed for using the force and torque values read by a force torque sensor
embedded in the e-Series robot wrist. The software interface provides force and torque feedback that can be used for robotic
applications suh as hand guiding, force control processes, assembly tasks, product testing, and much more on e-Series robot. The
hardware counterpart of Finishing Copilot is the license dongle, a USB storage device hosting the product license. The Finishing
Copilot software is used for the implementation of a force torque sensor's operational commands in a user interface and that unlocks
force control features and functionalities.
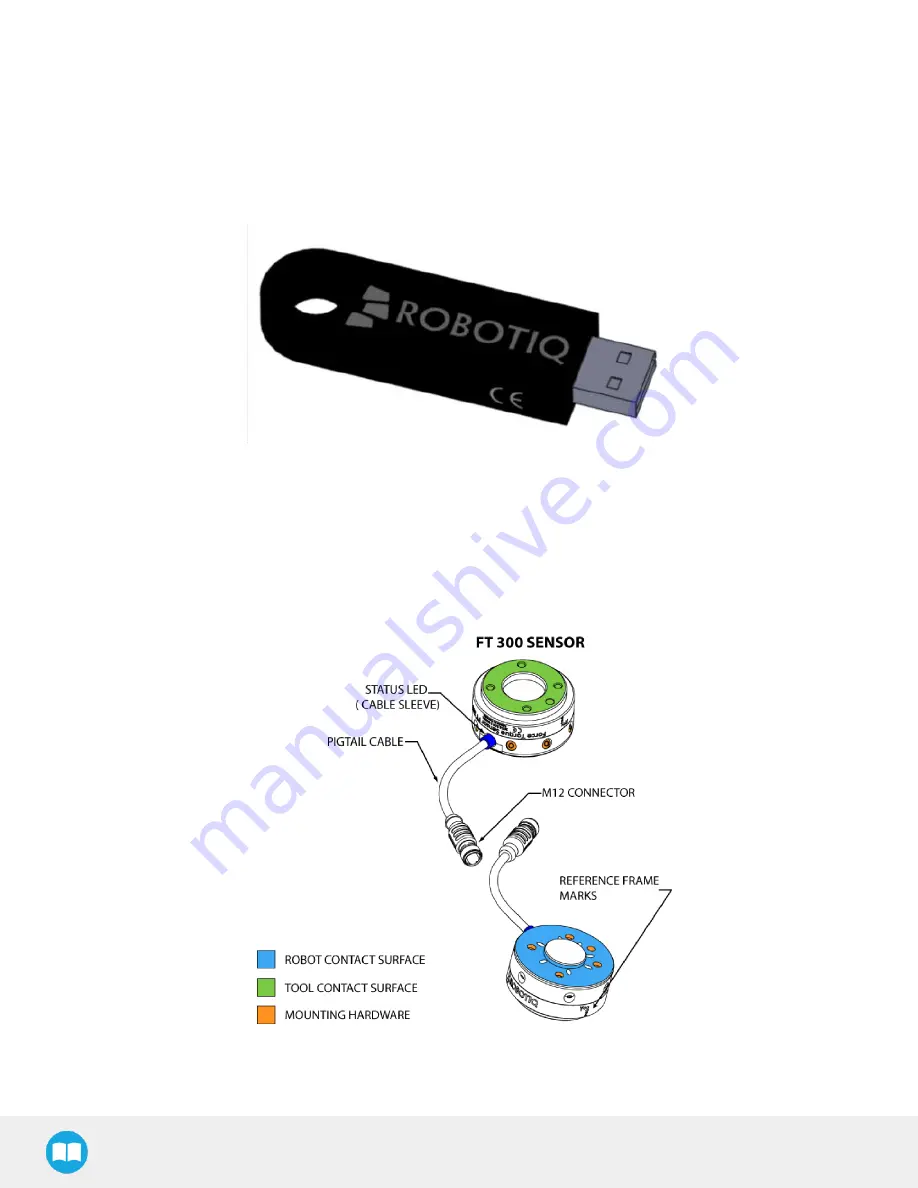
Fig. 1-5: Finishing Copilot License Dongle
1.3. Robotiq Force Torque Sensor on CB-Series robots
The Force Torque Sensor is a robotic peripheral designed for force and torque data acquisition on CB-Series robot.
Fig. 1-6: General presentation of the Robotiq Force Torque Sensors with main features.
l
The end-of-arm tool contact surface (in green) is the only point of contact allowed between the Sensor and the tool to ensure correct
force and torque feedback.
10




































































