





























External Tool Finishing Kit - Instruction Manual
2. Tap Transition_Point from the Robot Program, move the robot to the required position, and select Set waypoint .
Info
Transition Point : feature point used to move between waypoints without colliding with the object.
3. Repeat for Approach_Point .
4. Setup the Find Surface node. For more details, see Find Surface Node section.
5. Tap Retract_Point from the Robot Program, move the robot to the required position, and select Set waypoint .
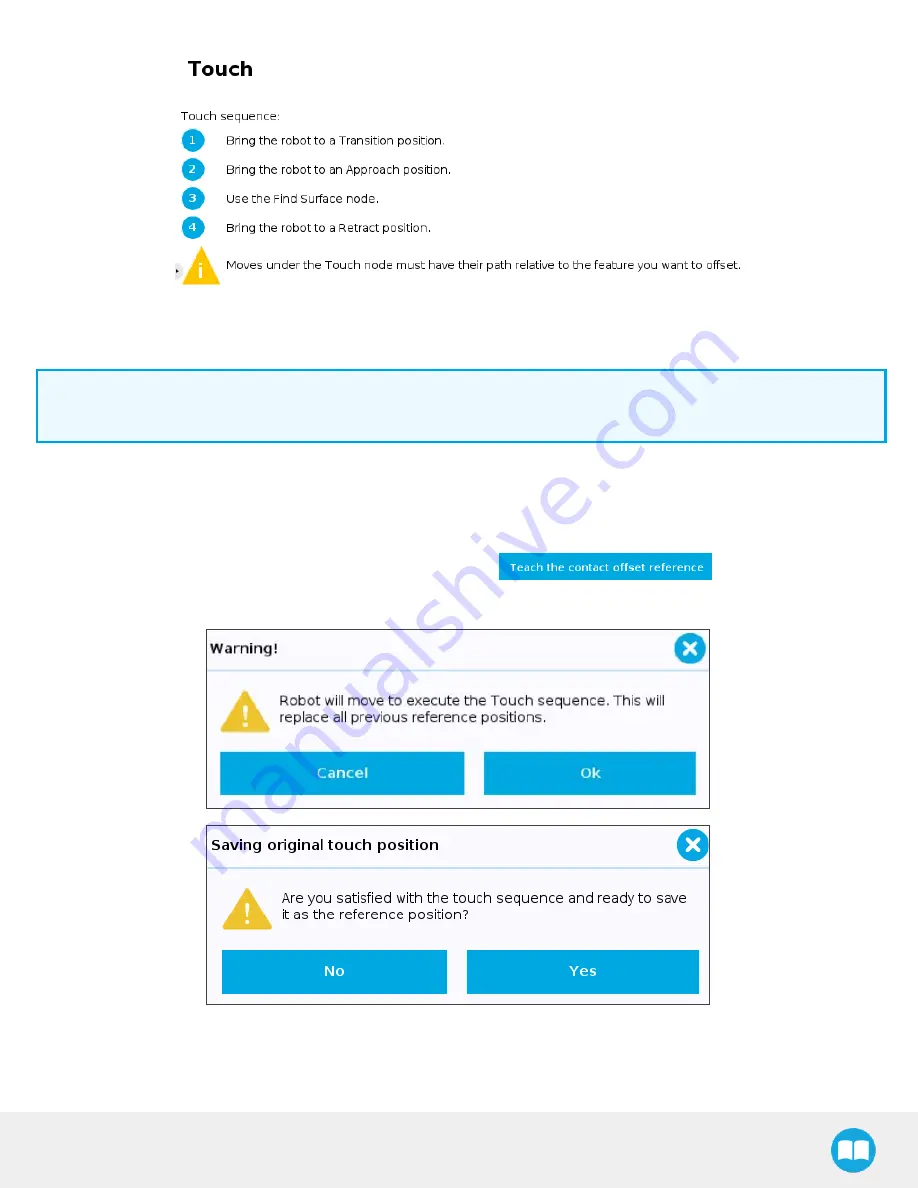
6. Return to the Find Contact Offset node in the program tree and tap
7. The following windows are displayed :
8. Select Yes to save the offset value as the reference position, which can then be used for programs under the Apply Contact Off-
set node. Select No if you want to set up different waypoints for the Touch sequence.
9. Proceed by inserting an Apply Contact Offset node.
55







































































