





























External Tool Finishing Kit - Instruction Manual
Select the waypoint in the program tree and tap the appropriate radio button in the Command tab.
Repeat step 2 until you complete your Multipoint Path.
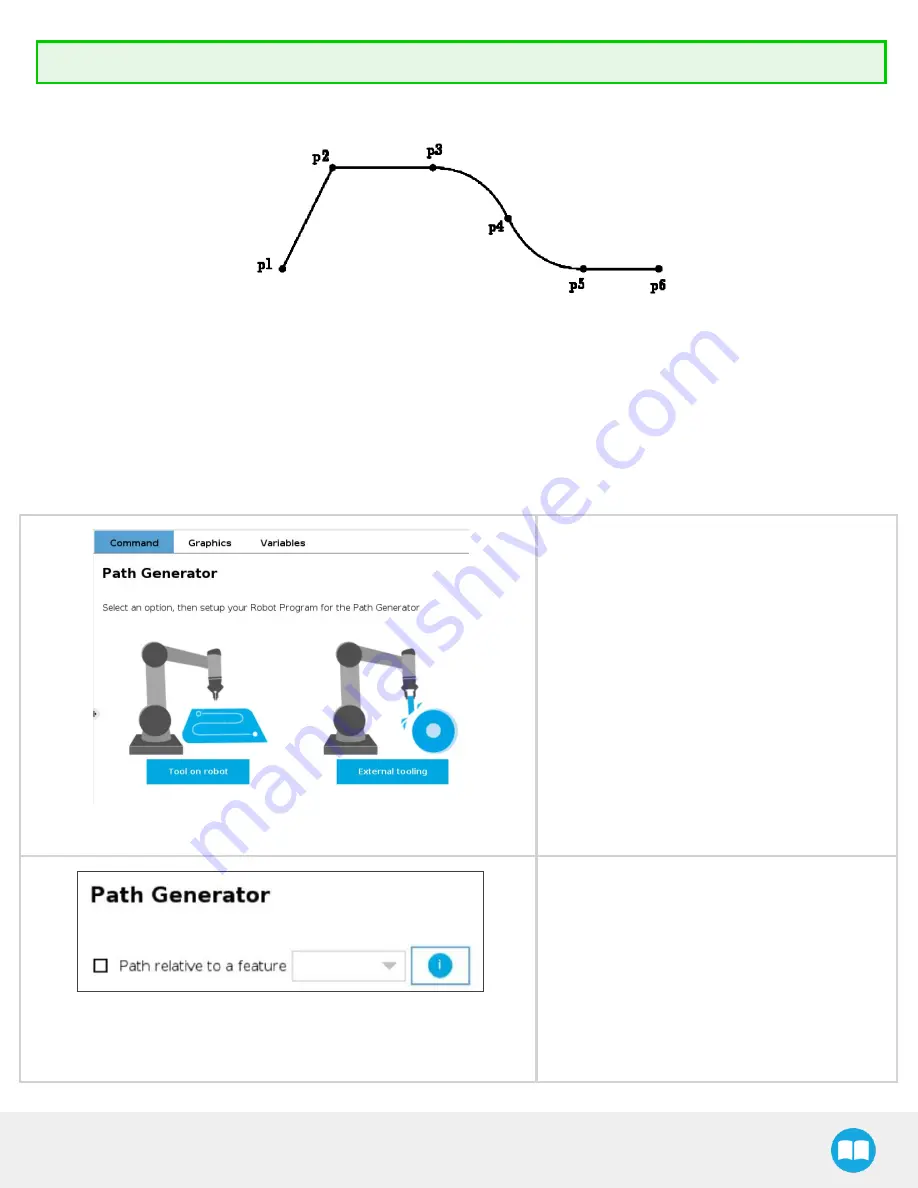
Fig. 4-25: Representation of a six-waypoint Multipoint Path with both curves and straight lines.
4.2.6. Path Generator
The Path Generator node allows you to program and edit complex trajectory in a matter of minutes. You can put the Path Generator
node within a Force Control node to make sure your robot applies a constant force along the process.
l
To add a Path Generator node, open the URCaps
menu from your program.
l
Choose Path Generator.
l
On the command tab, select the Tool on robot or
the External Tooling option.
Tool on robot option:
l
Check the Path relative to a feature box to choose
between the Actual pose of the robot or go con-
figure a Feature point in Installation tab
→
Features
→
Point.
External Tooling option:
l
Configure the position and the orientation of your
69





































































