





























Robotiq 3-Finger Adaptive Robot Gripper
Instruction Manual
Robotiq inc. © 2008 - 2014
100
6.4 Moment of inertia and center of mass
The coordinate system used for calculating the moment of inertia and center of mass for the 3-Finger Adaptive
Gripper is shown in
. This represents a configuration where the fingers are fully open in Wide Mode.
Info
All values are approximate. Actual coordinates may vary according to fingertip type and various
options present on the Gripper.
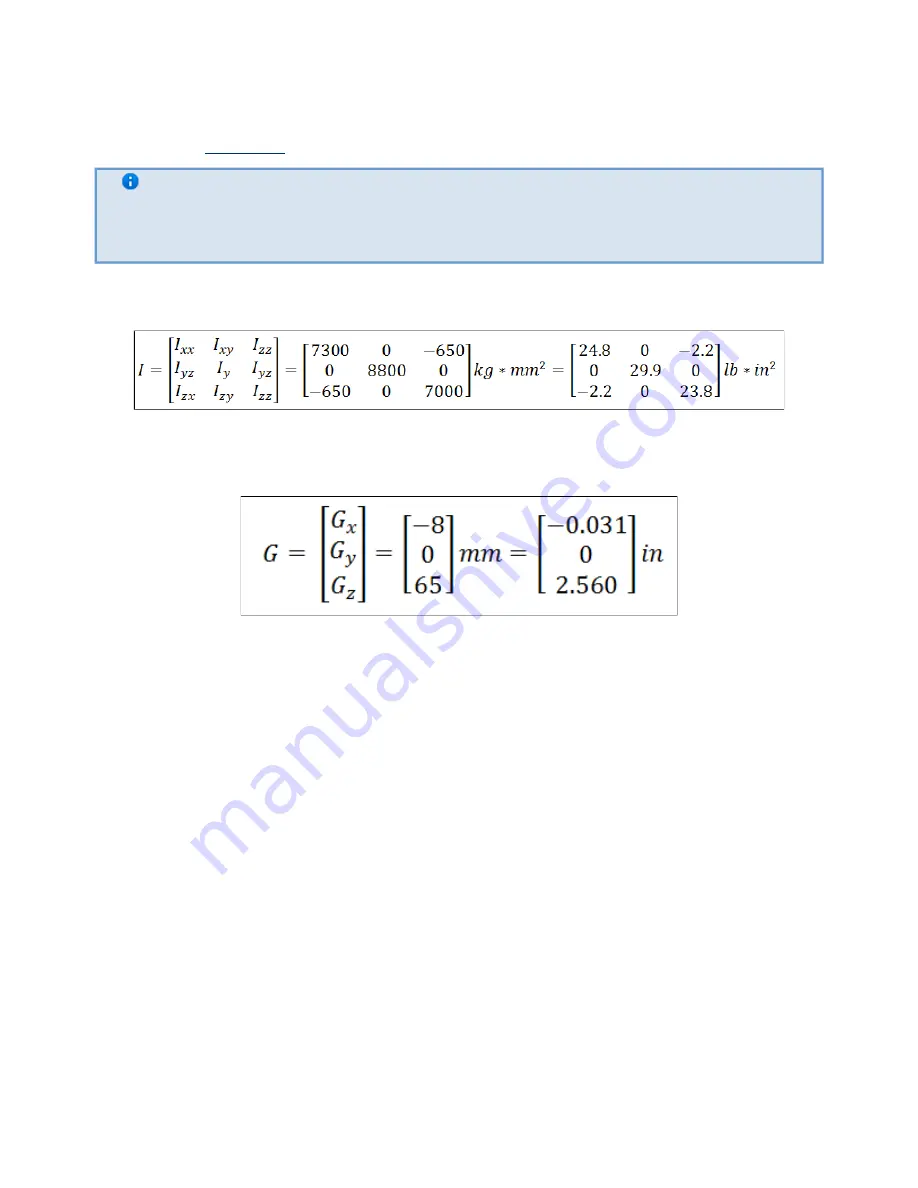
Here is the approximate moment of inertia matrix for the 3-Finger Adaptive Gripper :
Here is the approximate position of the center of mass for the 3-Finger Adaptive Gripper :






























































