





























Robotiq 3-Finger Adaptive Robot Gripper
Instruction Manual
Robotiq inc. © 2008 - 2014
102
6.6 Couplings
6.6.1 Blank coupling
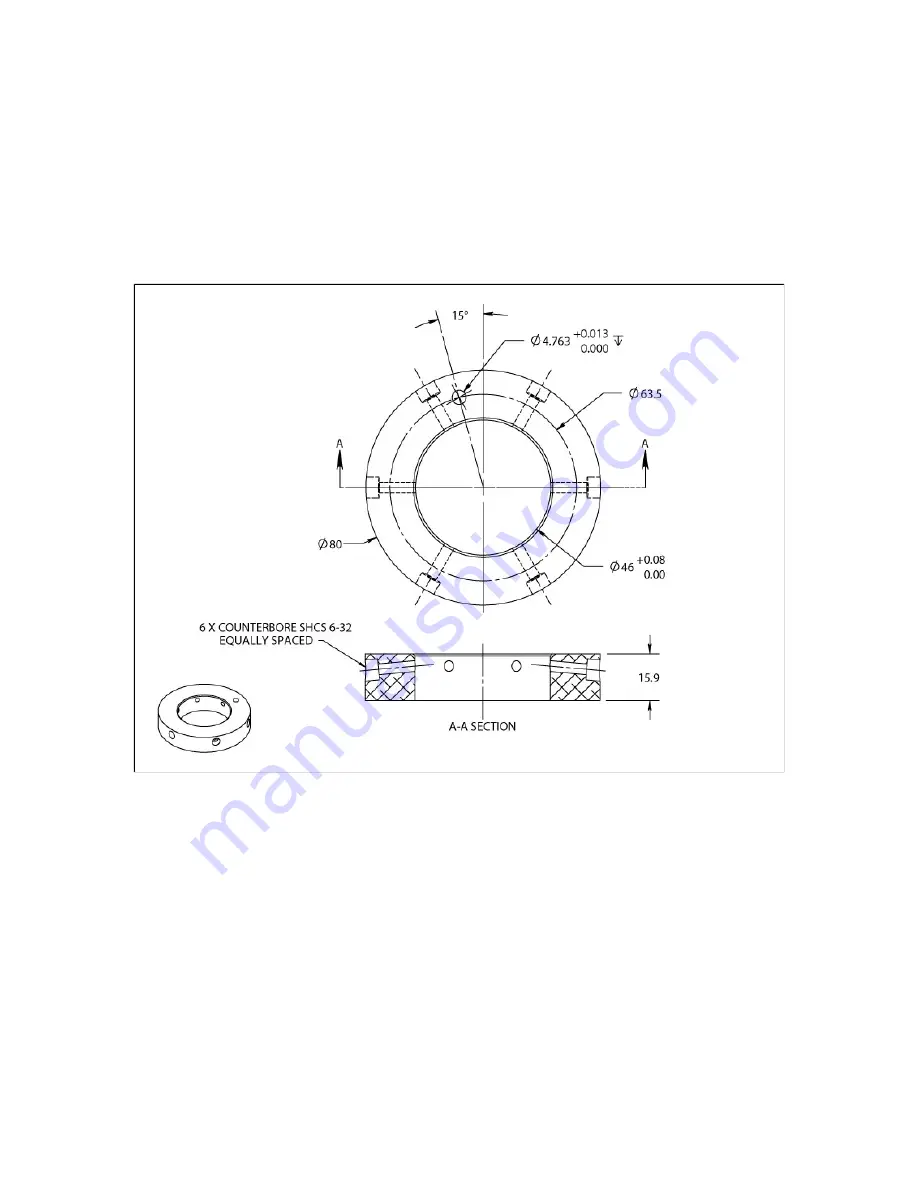
The 3-Finger Adaptive Robot Gripper blank coupling can be used to create a custom coupling between the Gripper
Universal Wrist and your robot. Provided screw clearance and dowel pin hole are meant for installation on the
Universal Wrist. Top face shown in figure 6.6.1.1 is meant to be on the wrist side while bottom face is meant to be
on the robot side.
Figure 6.6.1.1 : Blank faceplate for the
.
3-Finger Gripper







































































