























2/22/2018
ROBOTIS e-Manual
http://emanual.robotis.com/docs/en/dxl/x/xm430-w210/
9/34
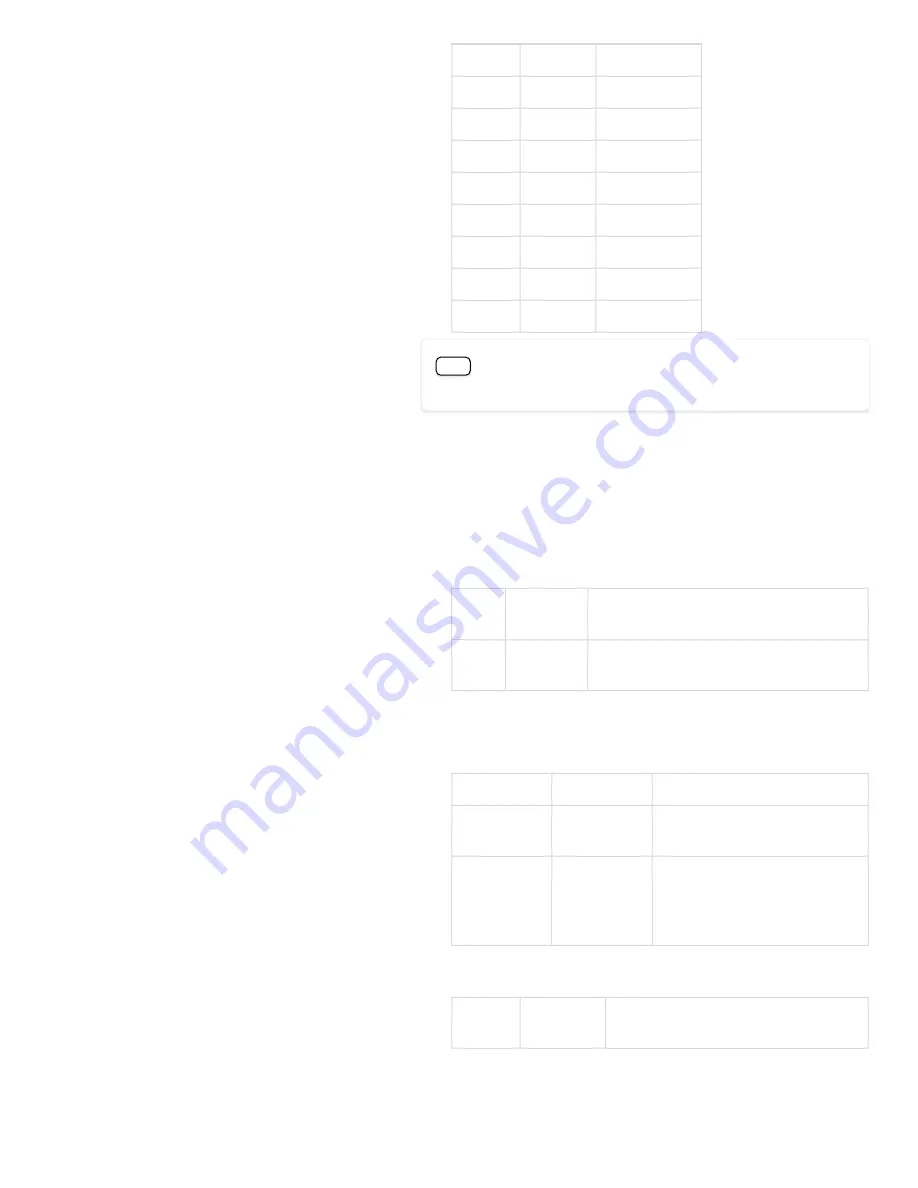
Value
Baud Rate Margin of Error
7
4.5M
0.000%
6
4M
0.000%
5
3M
0.000%
4
2M
0.000%
3
1M
0.000%
2
115,200
0.000%
1(Default)
57,600
0.000%
0
9,600
0.000%
Note
Less than 3% of the baud rate error margin will not affect
to UART communication.
2. 4. 5. Return Delay Time(9)
After the DYNAMIXEL receives an Instruction Packet, it delays
transmitting the Status Packet for Return Delay Time (9). For
instance, if the Return Delay Time(9) is set to ‘10’, the Status
Packet will be returned after 20[μsec] when the Instruction
Packet is received.
Unit
Value
Range
Description
2[μsec]
0 ~ 254
Default value ‘250’(500[μsec]), Maximum
508[μsec]
2. 4. 6. Drive Mode(10)
Drive Mode is availabe from the firmware version 38.
Bit
Item
Description
Bit 1(0x02) ~
7(0x80)
N/A
Unused, always ‘0’
Bit 0(0x01)
Direction of
Rotation
Normal Mode(0): CCW(Positive),
CW(Negative)
Reverse Mode(1): CCW(Negative),
CW(Positive)
2. 4. 7. Operating Mode(11)
Value
Operating
Mode
Description
Back to Top ▲







































































