



















RBTNK-DOC-
161020
Hardware Manual.
RB-1 Modular Mobile Manipulator
●
MICO or JACO arm:
The RB-1 can incorporate a MICO or JACO arm
from Kinova.
●
Laser location:
Place inside the robot where is possible to install the
compatible laser rangefinder describe in the section 2.2.4.1.
●
Base Orbeec:
The Orbeec camera is installed standard on the robot.
This camera is used for charging in the automatic charger base.
● Front cover: Can be removed to access to the electrical box
connections, the motors, the laser and the Orbecc camera.
●
Battery cover:
Can be removed to access to the battery pack.
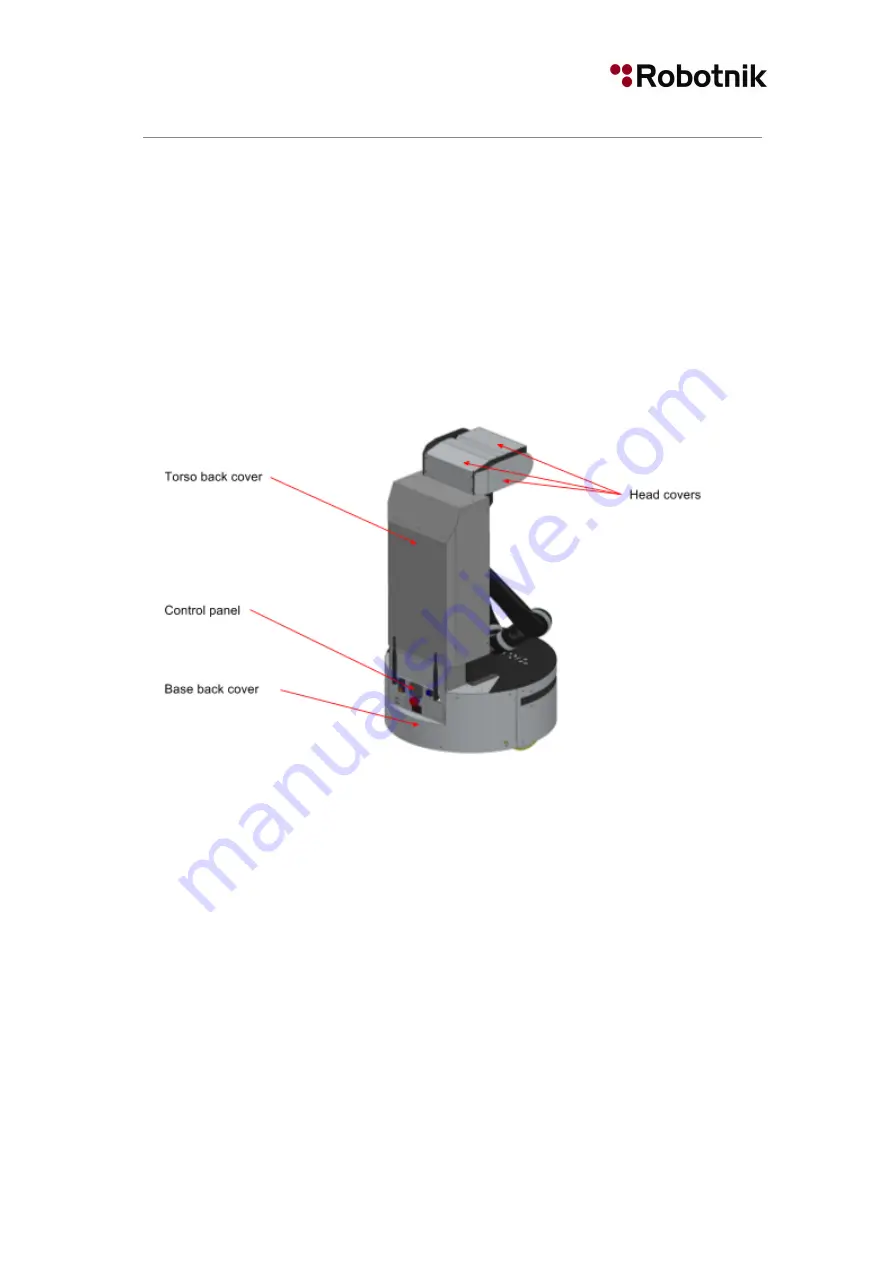
The next pictures shows the rear view of the robot with the location of
the main parts.
Figure 2 – Rear view of RB-1 robot
●
Torso back cover:
Can be removed to access to the internal
components placed on the torso back.
●
Head covers:
Can be removed to access to the head motors and the
Orbecc.
●
Base back cover:
Can be remove to acces to the robot motors.
●
Control panel:
It include the general power switch, the restart button,
the cpu start button, the emergency stop, the antennas, the manual
charger connector, external access to the computer and the location of
the fuses.
5






































































