




























Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
85
Connecting the Kinetix 5500 Drive System
Chapter 5
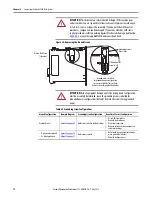
Figure 50 - 14 and 10 AWG Cable Installation
When the drive/motor combination calls for 14 or 10 AWG cable, the
feedback cable routes along with the power and brake wiring.
2.
Position the exposed portion of the cable braid directly in line with the
clamp.
3.
Tighten the clamp screws. Torque value 2.0 N•m (17.7 lb•in) max.
4.
Repeat
step 1
through
step 3
for each drive in multi-axis configurations.
Motor Cable
Shield Clamp
Motor Power
(MP) Connector
Motor Brake
(BC) Connector
Exposed shield braid
under clamp.
Shield Clamp Screws (2)
Feedback cable routed
within the shield braid.
Kinetix 5500 Servo Drives,
Frame 2 or 3, Front View
(frame 2 is shown)
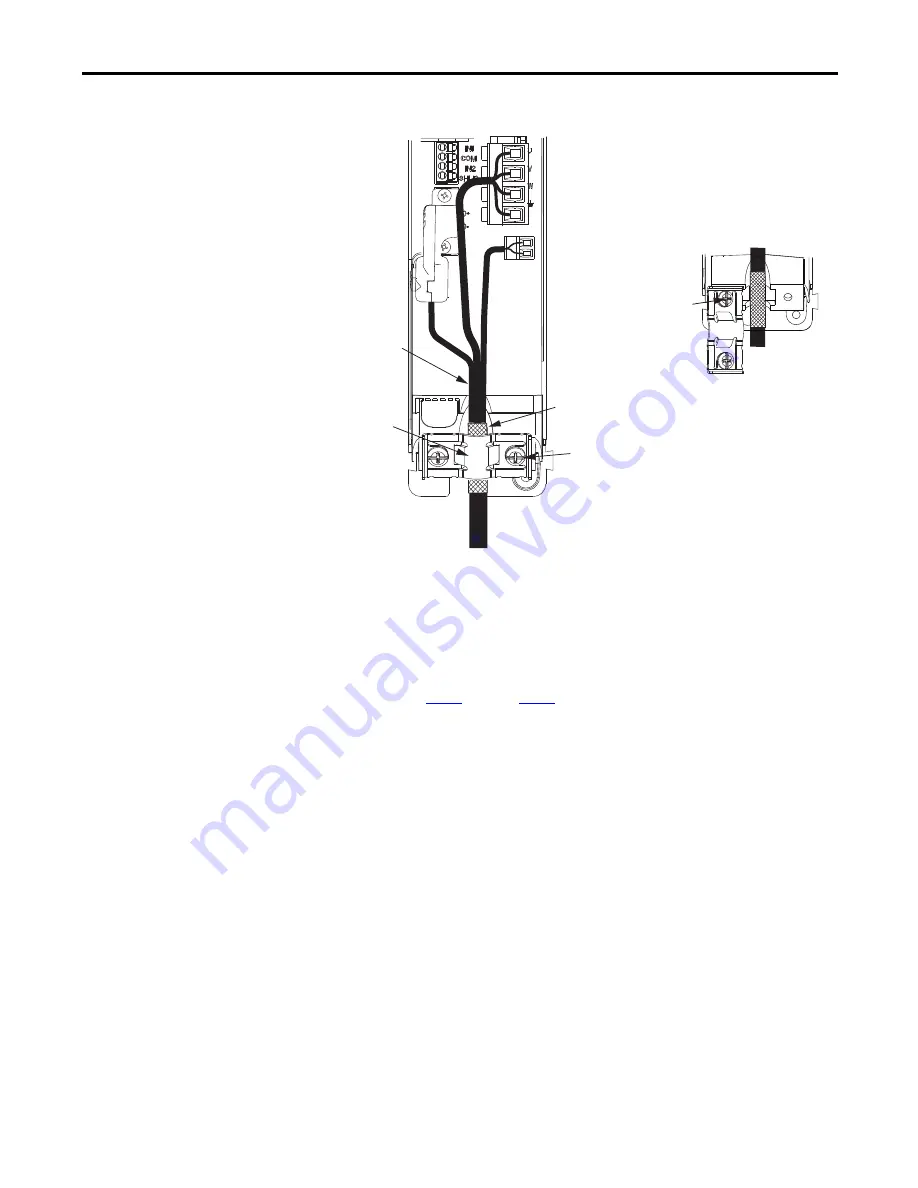
2198-KITCON-DSL
Motor Feedback
Connector Kit
Retention Screw
(loosen, do not remove)
Clamp features apply to all
frame sizes.
Torque clamp screws to
2.0 N•m (17.7 lb•in), max
Bulletin 2090 Single Motor Cable







































































