





























Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
159
Kinetix 5500 Safe Torque-off - Hardwired Safety
Chapter 9
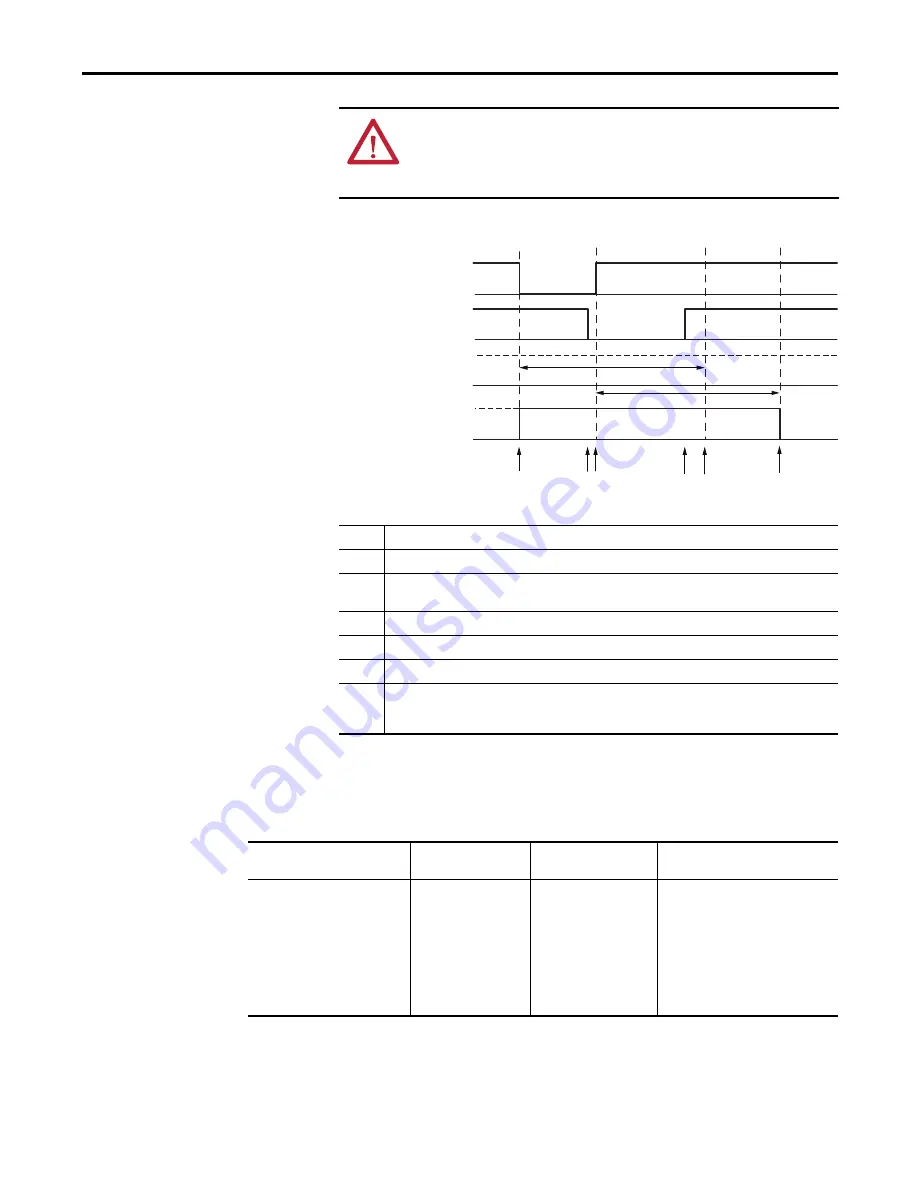
Figure 66 - System Operation when Inputs are Meeting Timing Requirements
Troubleshoot the Safe Torque-off Function
Table 73 - 2198-H
xxx
-ERS Servo Drive Troubleshooting
ATTENTION:
If any of the safety enable inputs de-energize, the Start Inhibit
field indicates SafeTorqueOffInhibit and GuardStopRequestStatus bit of
AxisGuardStatus tag set to 1. Both inputs must be de-energized within 1 second
and re-energized within 1 second to avoid GuardStopInputFault conditions.
24V DC
24V DC
0V DC
0V DC
1
1
0
0
100 ms
1 Second
1
2 3
4
5
6
GuardStopRequestStatus
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
Event
Description
1
At least one input is switched-off. GuardStopRequestStatus bit is set to 1.
2
Second input is switched-off within 1 second. This event must always occur prior to Event 3 to prevent
GuardStopInputFault.
3
First input is switched-on.
4
Second input is switched-on within 1 second of event 3.
5
Both inputs are in OFF state simultaneously within 1 second. As a result, GuardStopInputFault is not posted.
6
GuardStopRequestStatus bit sets back to 0 if event 4 occurred within 100 ms interval after event 3. If event 4
is outside of the 100 ms interval and within the 1 second (event 3) interval, then GuardStop RequestStatus
bit sets back to 0 after the 1 second interval following event 3.
Exception Code on Drive Display
Fault Message
Logix Designer
Problem
Possible Solutions
SAFE FLT 09 - SS IN
GuardStopInputFault
Safe torque-off function
mismatch. System does not
allow motion. Safe torque-
off mismatch is detected
when safety inputs are in a
different state for more
than 1.0 second.
•
Verify safety wiring and connections:
–
Wire terminations at safe torque-
off (STO) connector
–
Cable/header not seated correctly
–
+24V power
•
Check state of safety inputs.
•
Reset error and run proof test.
•
If error persists, return the drive to
Rockwell Automation.







































































