





























PowerFlex Digital DC Drive User Manual -
Publication 20P-UM001C-EN-P - July 2008
3-14
Programming and Parameters
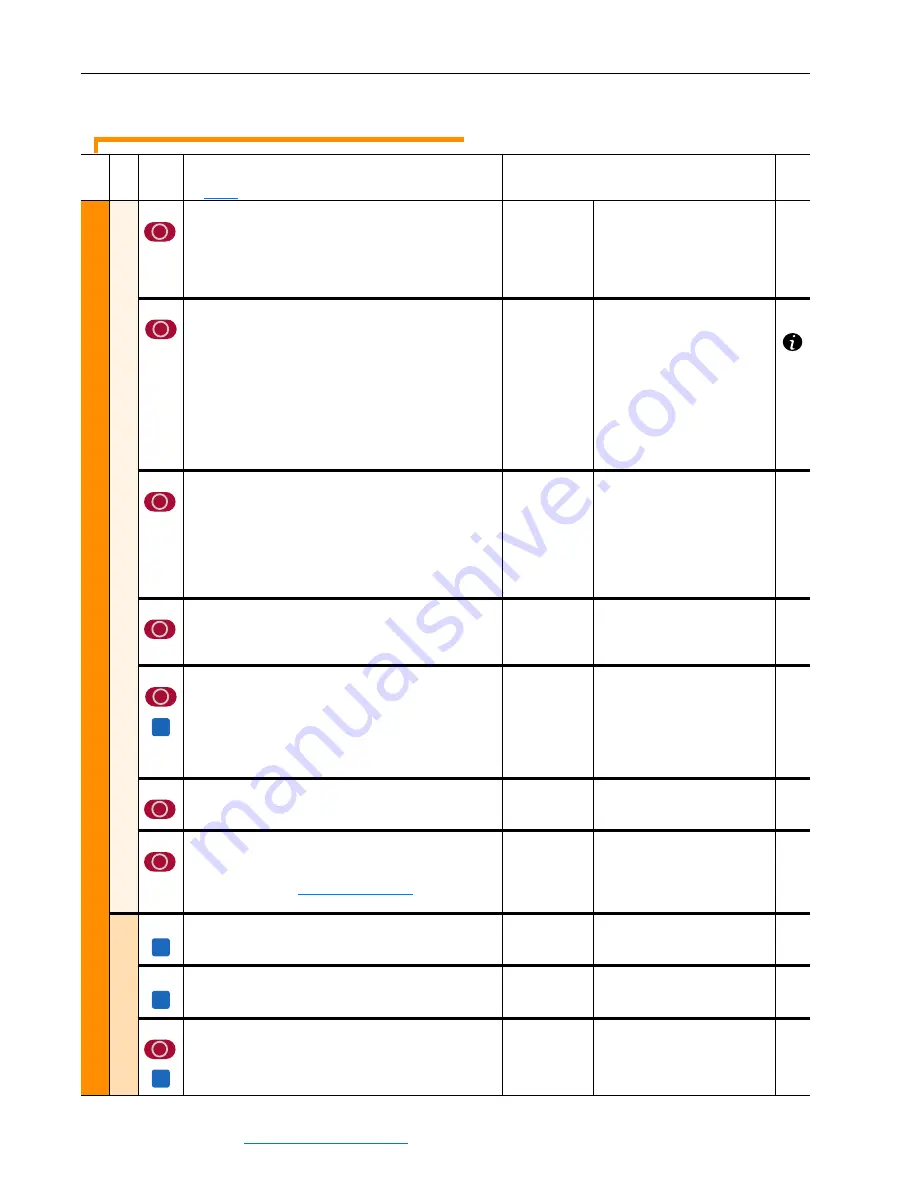
Motor Control File
Fil
e
Gr
oup
No.
Parameter Name & Description
for symbol descriptions
Values
Related
MO
T
O
R C
O
NTR
O
L
Motor Data
45
[Max Ref Speed]
Maximum reference speed as determined by the application. If
Field Weakening is not required, this value will be equal to the
Motor Nameplate Base Speed (RPM). The value of this
parameter is used to scale all of the other speed reference
related parameters.
Default:
Min/Max:
Units:
1750
1 / 16383
RPM
162
[Max Feedback Spd]
Maximum feedback speed as determined by the application. If
Field Weakening is not used, the value of this parameter will be
equal to the Motor Nameplate base speed. This value must be
at least 10% lower than the Motor nameplate maximum safe
speed (in order to allow an “Overspeed” fault to occur). The
value in this parameter is also used to convert tachometer and
armature feedback values to rpm. When armature voltage
feedback is used, the value of Par 175 [Rated Motor Volt] is
considered equivalent to Par 162 [Max Feedback Spd].
Therefore, this parameter should be set appropriately.
Default:
Min/Max:
Units:
1750.00
1.00 / 6553.00
RPM
162,
175
175
[Rated Motor Volt]
Maximum armature voltage of the drive. Typically, this value is
set to the Motor Nameplate Armature voltage. When Par 469
[Field Mode Sel] is set to 1 = “Field Weaken”, the value in this
parameter equals the voltage that begins the weakening phase
of the field.
Note: This parameter affects the threshold of an overvoltage
condition, as indicated by an “Arm Overvoltage” fault (F5).
Default:
Min/Max:
Units:
500.00
20.00 / 999.00
V
469
179
[Nom Mtr Arm Amps]
Rated motor nameplate armature current. The settings for the
current limit and the overload function are based on this current
value.
Default:
Min/Max:
Units:
Based on drive current rating
0.10 / Based on drive current rating
A
201
[Drive Type Sel]
This parameter is only applicable to non-regenerative
(2-quadrant) drives. It allows non-regenerative drives to use an
external 4-quadrant controller.
•
“On” = Ramp, Speed, Torque current references and Speed
measurement have the same behavior of a four quadrant
drive.
Default:
Options:
0 =
0 =
1 =
“Off”
“Off”
“On”
280
[Nom Mtr Fld Amps]
Rated motor nameplate field current (I
dFN
).
Default:
Min/Max:
Units:
Par 374 [Drv Fld Brdg Cur] x 0.33
0.00 / [Drv Fld Brdg Cur]
A
374
[Drv Fld Brdg Cur]
Drive rated field bridge current (I
dFN
). The value in this field must
be set equal to the value chosen with DIP switch S14 on the
Control board (refer to
for DIP switch
configuration).
Default:
Min/Max:
Units:
1.00
0.50 / 80.00
A
Field Config
91
[Fld Reg Kp]
Proportional gain (K
P
) of the flux regulator expressed as a
percentage of Par 97 [Fld Reg Kp Base].
Default:
Min/Max:
Units:
2.00
0.00 / 100.00
%
97
92
[Fld Reg Ki]
Integral gain (K
I
) of the flux regulator expressed as a percentage
of Par 98 [Fld Reg Ki Base].
Default:
Min/Max:
Units:
1.00
0.00 / 100.00
%
98
97
[Fld Reg Kp Base]
The proportional gain (K
P0
) of the field current regulator (base
value).
Default:
Min/Max:
3277.00
0.10 / 32770.00
A
A
A
A







































































