



















GuardCom Installation Manual
guardcom_installation_manual_v1.0.docm
Publicly available
p. 26 of 31
6.2
Three control options
–
open/close/ready
The GuardCom System offers the possibility to activate three independent control options:
•
control_open
•
control_close
•
control_ready
Each of the options can be activated independently of the others by moving the corresponding
jumper inside the GuardCom. Refer to section 6.3 for instructions on how to enable the modes.
control_open
In this setting the Guard is not opened until the input signal ok_to_open is set high from the
conveyor station. This can hold back delivery of a package from the robot if the conveyor station is
not ready to receive it.
control_close
In this setting the Guard is not closed until the input signal ok_to_close is set high from the conveyor
station.
Note that this may leave the Guard open although the robot has left.
control_ready
In this setting the input signal confirm_ready must be set high for the guardcom_is_ready light to be
turned on. This can be used to communicate to the robot that the emergency stop on the conveyor
station has been triggered (section 7.1).
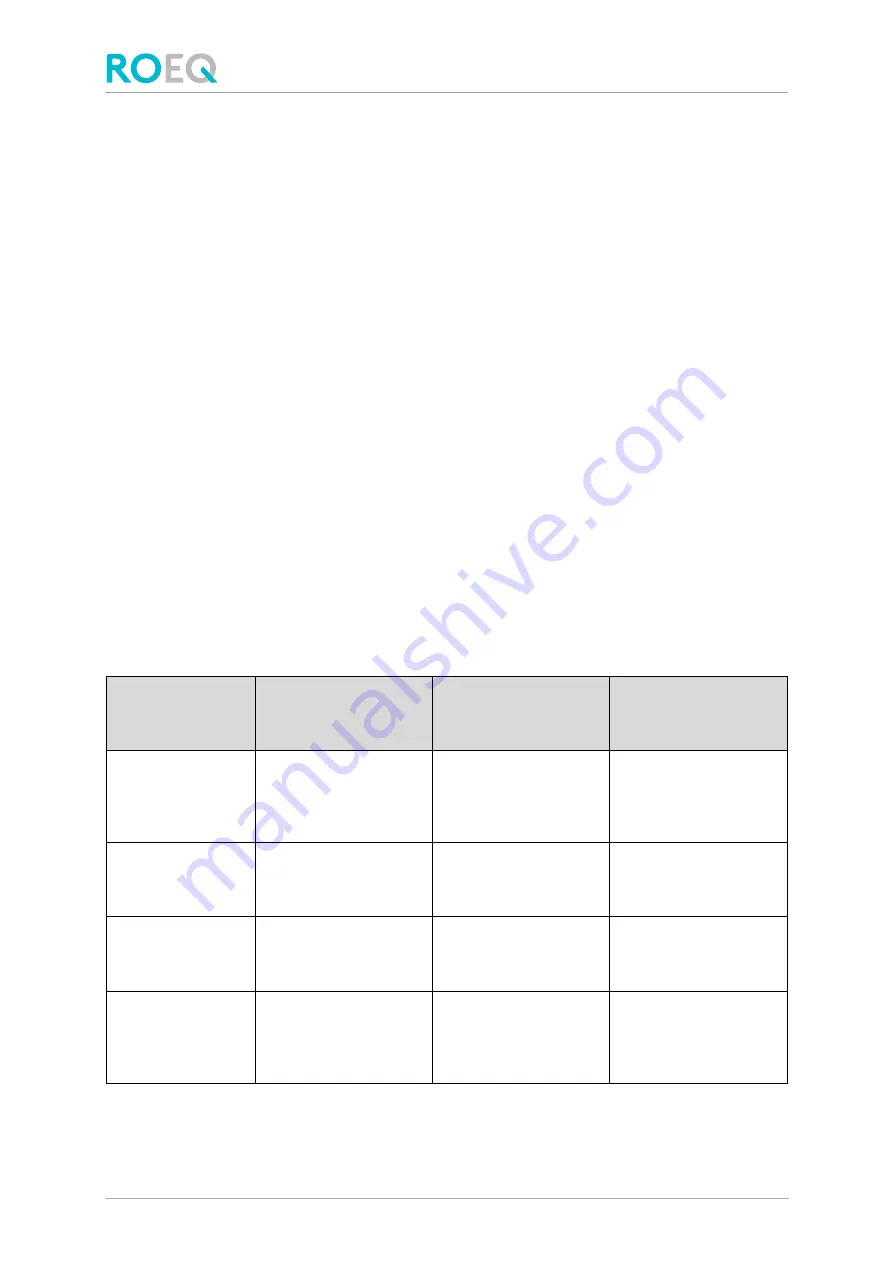
The functionalities in default and the three options are summarized here (as seen from the
GuardCom unit):
(refer to Figure 12, section 5 for signal overview)
Option
Conditions to make
Guard open
Conditions to make
Guard close
Conditions to make
GuardCom ready
(guardcom_is_ready
light on)
Default setting
Jumper 1: E13-E14
Jumper 2: E16-E17
Jumper 3: E22-E23
robot_is_ready (on)
robot_is_ready (off)
Guard fully open
+
robot_is_ready (on)
control_open
Jumper 1: E12-E13
robot_is_ready (on)
+
ok_to_open (on)
Not affected
(same as default setting)
Not affected
(same as default setting)
control_close
Jumper 2: E15-E16
Not affected
(same as default setting)
robot_is_ready (off)
+
ok_to_close (on)
Not affected
(same as default setting)
control_ready
Jumper 3: E21-E22
Not affected
(same as default setting)
Not affected
(same as default setting)
Guard fully open
+
robot_is_ready (on)
+
confirm_ready (on)
Table 4.







































































