





























TMC300Ext Instruction Manual
Revision: 2.01
Publicly available
p. 30 of 55
3.8.2
Setting Docking parameters in MiR
–
only for MiR firmware after 2.4.1
Step
Instruction
Illustration
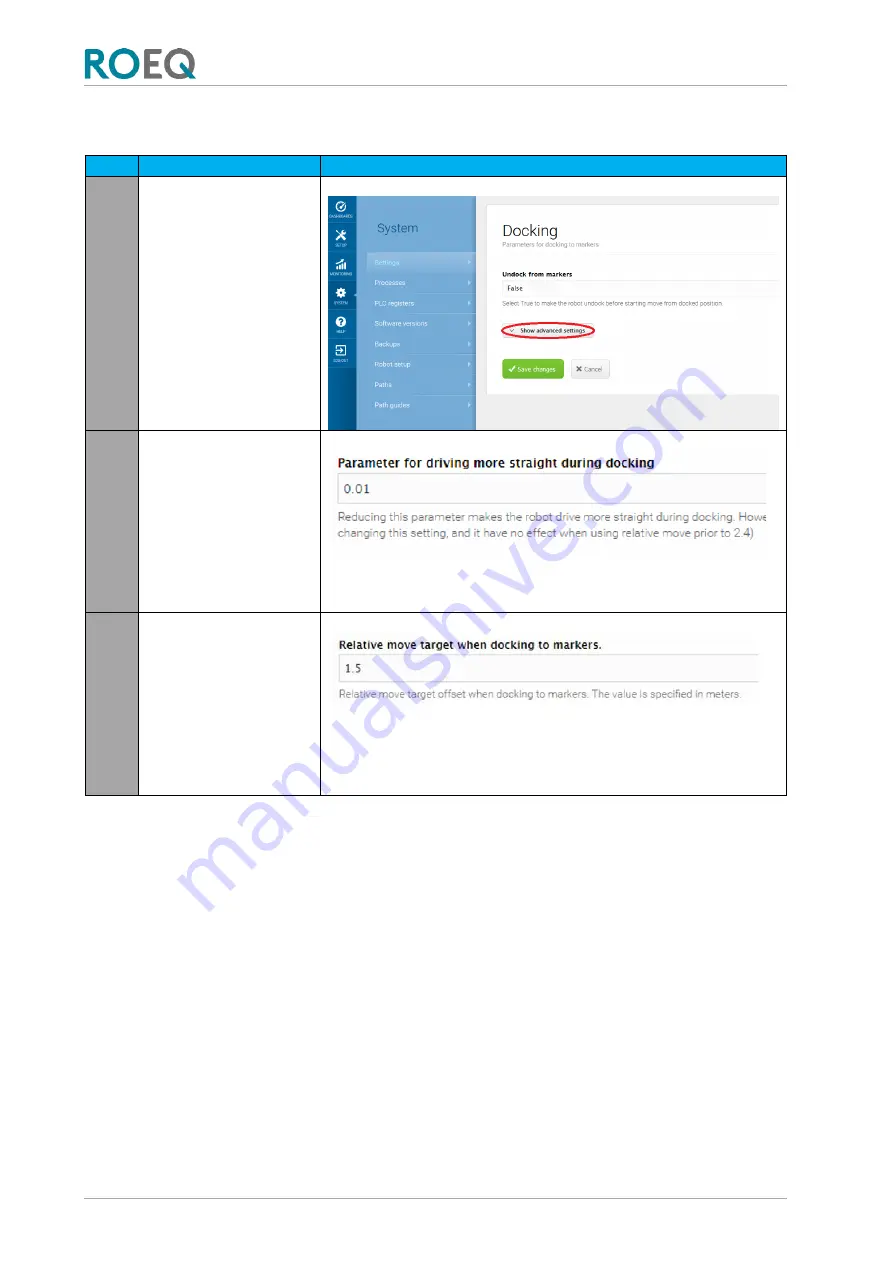
1.
In the MiR web
interface, go to:
System
→ Settings
→ Docking
and click
“Show advanced
settings”.
2.
Change the value in
“Parameter for driving
more straight during
docking” to 0.01
Note: This will ensure
that the robot drives
more straight while
docking.
3.
Change the value in
“Relative move target
when docking to
markers.” to 1.5
Note: This will ensure
that the robot drives
more straight while
docking.







































































