



























13
TX11 June 2011
2.2 Tipi di servizio
Le potenze nominali motore indicate a catalogo sono riferite al ser-
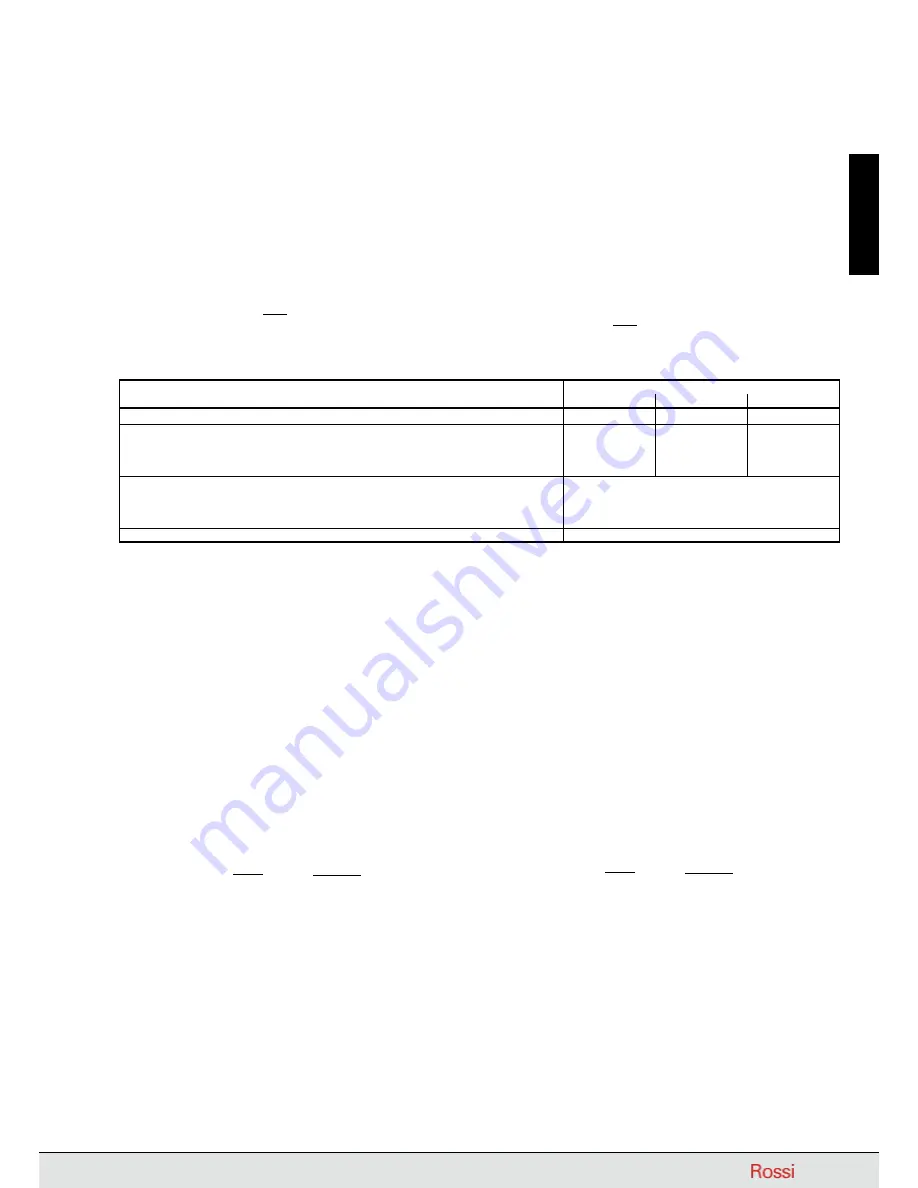
vizio continuo S1 (salvo diversa specifica indicazione). Per servizi di
tipo S2 ... S10 è possibile incrementare la potenza del motore secon-
do la tabella seguente; il momento torcente di spunto resta invariato.
Servizio continuo (S1).
– Funzionamento a carico costante di dura-
ta sufficiente a consentire al motore il raggiungimento dell'equilibrio
termico.
Servizio di durata limitata (S2).
– Funzionamento a carico costan-
te per una durata determinata, minore di quella necessaria per rag-
giungere l’equilibrio termico, seguito da un tempo di riposo di durata
sufficiente a ristabilire nel motore la temperatura ambiente.
Servizio intermittente periodico (S3).
– Funzionamento secondo
una serie di cicli identici, ciascuno comprendente un tempo di fun-
zionamento a carico costante e un tempo di riposo. Inoltre in questo
servizio le punte di corrente all’avviamento non devono influenzare il
riscaldamento del motore in modo sensibile.
Rapporto di intermittenza =
N
N + R
· 100%
N è il tempo di funzionamento a carico costante,
R è il tempo di riposo e
N
+
R
= 10 min (se maggiore interpellarci).
2.2 Duty types
Rated motor powers are referred to S1 continuous running duty
(except where differently stated). In case of a duty-requirement type
S2 ... S10 the motor power can be increased as per the following
table; starting torque keeps unchanged.
Continuous running duty (S1).
– Operation at a constant load
maintained for sufficient time to allow the motor to reach thermal
equilibrium.
Short time duty (S2).
– Running at constant load for a given period
of time less than that necessary to reach normal running tempe-
rature, followed by a rest period long enough for motor’s return to
ambient temperature.
Intermittent periodic duty (S3).
– Succession of identical work
cycles consisting of a period of running at constant load and a rest
period. Current peaks on starting are not to be of an order that will
influence motor heat to any significant extent.
Cyclic duration factor =
N
N + R
· 100%
N being running time at constant load,
R the rest period and
N
+
R
= 10 min (if longer consult us).
1) Per motori identificati con il simbolo
ai cap. 3.4, 4.5, 5.5, 6.5, interpellarci.
1) For motors identified by symbol
at ch. 3.4, 4.5, 5.5, 6.5, consult us.
2.3 Calcoli di verifica e valutazione
Le principali verifiche necessarie affinché motore e freno possano
soddisfare le esigenze applicative consistono in:
– dati il momento torcente richiesto e le inerzie applicate, la
fre-
quenza di avviamento
non deve superare il valore massimo
am messo dagli avvolgimenti del motore senza che si abbiano
surriscaldamenti;
– dato il numero di frenate/h, il
lavoro di attrito per ogni frenatura
non deve superare il massimo valore ammesso dalla guarnizione
d’attrito.
Ved. sotto le modalità di verifica.
Frequenza massima di avviamento
z
Orientativamente la massima frequenza di avviamento
z
, per un
tempo di avviamento 0,5
1 s e con inserzione diretta, è di 125
avv./h per grandezze 63 ... 90, 63 avv./h per grandezze 100 ... 160S,
16 avv./h per grandezze 160M ... 315S; dimezzare i valori per motori
con volano (ved. esecuzione speciale 4.(23), i quali, avendo
J
0
più
elevato (per ottenere avviamenti e arresti progressivi), possono fare
un numero minore di avviamenti a parità di condizioni.
Quando è necessaria una frequenza di avviamento superiore verifi-
care che:
z
z
0
·
J
0
J
0
+
J
·
K
·
[
1 -
(
P
richiesta
P
N
)
2
· 0,6
]
K = 1
se il motore, durante l’avviamento, deve vincere solo cari-
chi inerziali;
K = 0,63 se il motore, durante l’avviamento, deve vincere anche ca ri-
chi resistenti di attrito, di lavoro, di sollevamento, ecc.
In caso di risultati insoddisfacenti o in presenza di frenature ipersin-
crone frequenti la verifica può essere fatta con formule più dettaglia-
te:
interpellarci
.
2.3 Verifying and evaluating calculations
Main necessary verifications so that motor and brake can satisfy
application needs are:
– given required torque and applied inertiae,
frequency of starting
has not to exceed maximum value permissible by motor windings
without overheatings;
– given number of brakings/h,
work of friction for each braking
has not to exceed maximum permissible value of friction surface.
See below verification modalities.
Maximum frequency of starting
z
As a guide, maximum frequency of starting
z
, for a starting time 0,5
1 s and with direct on-line start, is 125 starts/h for sizes 63 ... 90,
63 starts/h for sizes 100 ... 160S, 16 starts/h for sizes 160M ... 315S;
halve the values for motors with flywheel (see non-standard design
4.(23)), which, having a higher
J
0
(to get progressive starts and
stops), can have a lower number of starts at the same conditions.
When it is necessary to have a higher frequency of starting, verify
that:
z
z
0
·
J
0
J
0
+
J
·
K
·
[
1 -
(
P
required
P
N
)
2
· 0,6
]
K = 1
if motor, during the starting, must only overcome inertial
loads;
K = 0,63 if motor, during the starting, must also overcome resistent
friction, work, lifting loads, etc.
Where results are unsatisfactory or where frequent hypersynchro-
nous brakings occur, more detailed verification formulae can be
utilised:
consult us
.
2. Generalità
2. General
Servizio - Duty
Grandezza motore
1)
- Motor size
1)
63 ... 90
100 ... 160S
160M ... 315S
S1
1
1
1
S2
durata del servizio
duration of running
90 min
60 min
30 min
10 min
1
1
1,12
1,25
1
1,06
1,18
1,25
1,06
1,12
1,25
1,32
S3
rapporto di intermittenza
cyclic duration factor
60%
40%
25%
15%
1,12
1,18
1,25
1,32
S4 ... S10
interpellarci - consult us
Summary of Contents for TX11 Series
Page 2: ......
Page 203: ...203 TX11 June 2011...







































































