





























41
Analogue Signal
Failure Action
This sets the action to be taken upon
loss of the analogue signal. The set
action will be taken once the demand
signal falls below half the minimum
value calibrated. For example, action will
be taken if the signal falls below 2 mA if
the lowest calibrated value is 4 mA.
[OF]
Alarm Off (Default):
This option
will move the actuator to the low
demand signal position.
[ A] Alarm On:
This option will trip the
fault relay and move the actuator to the
low demand signal position.
[AE] Alarm and SW ESD:
This option
will trip the fault relay plus the actuator
will carry out the Software ESD action.
To change this function press the
+
or
-
key until the required setting is
displayed.
PRESS THE
KEY.
The displayed option will flash (stored)
indicating that it has been set.
FF
Ana Fail Action
Alarm Off
Analogue Control 2
Selectable Deadband and Hysteresis
values (independent in both directions
to optimise for different operating
speeds), are used to compensate for
momentum and solenoid valve response
time. Proper calibration provides
accurate positioning; preventing the
actuator from “hunting” and reducing
the number of motor/pump starts.
Some understanding of the operational
design parameters is required to
optimally set Deadband and Hysteresis.
If the actuator was at the closed limit
and a demand position input of 50%
was received, then, the controller
will command it to move in the open
direction until it reaches 49.7%
(Demand – (Deadband-Hysteresis).
Momentum/Solenoid response times
within the system may cause the
actuator to continue moving after
the stop command has been issued
as shown by the “Actual Stopped
Position” at 49.9%.
Movement will not be commanded
again until the measured position falls
outside of the Deadband either side of
the demand position. If the Deadband
was smaller, it would be possible for
the actual stopped position to have
fallen the other side of the Deadband
and as such the actuator would be
commanded to move in the opposite
direction in order to meet the demand.
This would result in “hunting” as the
actuator oscillated around the Demand
point.
By increasing the Deadband but also
increasing the amount of hysteresis,
the actual demand position can be met
without “hunting” occurring.
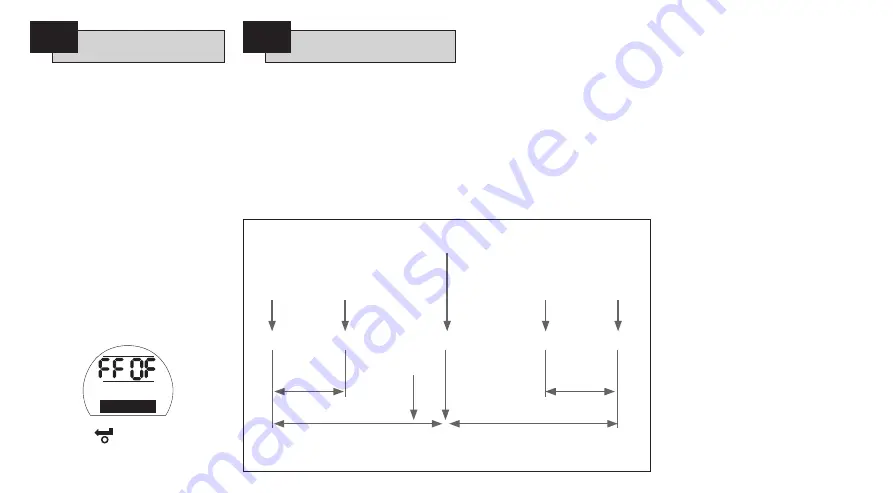
9.7
Initial Direction of Travel
Demand
Position
START
STOP
Opening
Actual
STOP
Position
START
STOP
Closing
49.5%
49.7%
50%
50.3%
50.5%
49.9%
Opening
Hysteresis
Closing
Hysteresis
Opening Deadband
Closing Deadband
Deadband set to 5 = 0.5%
Hysteresis set to 2 = 0.2%







































































