




















-15-
SOFTWARE SETUP
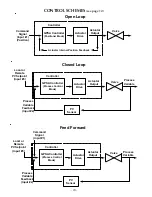
6.2.4 FEED FORWARD CONTROL PARAMETERS
6.2.4.1 CMD UNITS
This is a four character label that will be displayed with the
input command and it’s associated parameters. It is entirely
configurable by the operator. When selected for update, the
first of the four characters is highlighted. The
↑
/
↓
selections
are used to scroll through the available characters: A-Z, a-z,
space, -, % and /. Selecting
E
nter will set the displayed character
and continue to the next. When all four characters have been
set, the label is saved. At anytime prior to the final character
being set,
C
ancel may be selected and no change to the label
will be made.
6.2.4.2 CMD MAX
This is the input reading that is to be associated with the
maximum input signal of 20ma or 5V.
6.2.4.3 CMD MIN
This is the input reading that is to be associated with the
minimum input signal of 4ma or 1V.
6.2.4.4 CMD DAMP
Dampening is the amount of time over which the command
input signal is averaged. The setting may range from 0
seconds (no dampening) to 25 seconds. This is used to
smooth out rapid fluctuations of the input signal.
6.2.4.5 CMD LO ALRM
This is the level that signifies a low input command. When
the input command falls below this level, an alarm is
generated.
6.2.4.6 CMD ALRM DB
This parameter determines when the CMD LO ALRM is
cleared. The input command reading must rise above the
alarm level by this amount in order for the system to clear an
existing low command alarm. The parameter may be set
from 0.3% to 25% of the Input command range.
6.2.4.7 PV UNITS
This is a four character label that will be displayed with the
process variable and it’s associated parameters. It is entirely
configurable by the operator. When selected for update, the
first of the four characters is highlighted. The
↑
/
↓
selections
are used to scroll through the available characters: A-Z, a-z,
space, -, % and /. Selecting
E
nter will set the displayed character
and continue to the next. When all four characters have been
set, the label is saved. At anytime prior to the final character
being set,
C
ancel may be selected and no change to the label
will be made.
6.2.4.8 PV MAX
This is Process Variable reading that is to be associated with
the maximum input signal of 20ma or 5V, and local set point.
6.2.4.9 PV MIN
This is Process Variable reading that is to be associated with
the minimum input signal of 4ma or 1V, and local set point.
6.2.4.10 PV DAMP
Dampening is the amount of time over which the Process
Variable input signal is averaged. The setting may range from
0 seconds (no dampening) to 25 seconds. This is used to
smooth out rapid fluctuations of the input signal.
6.2.4.11 PV HI ALRM
This is the Alarm level that signifies that the Process Variable
signal is too high. When the process variable input rises
above this level an alarm is generated.
6.2.4.12 PV LO ALRM
This is the Alarm level that signifies a Process Variable signal
is too low. When the Process Variable input falls below this
level an alarm is generated.
6.2.4.13 PV ALRM DB
This parameter determines when the Process Variable High
and Low Alarms are cleared. The Process Variable signal
must rise above the Low Alarm level by the Deadband
amount in order to clear a Process Variable Low Alarm. The
Process Variable signal must fall below the Process Variable
High Alarm level by this amount to clear a Process Variable
High Alarm. The parameter may be set from 0.3% to 25% of
the Process Variable signal range.







































































