




























Parameters
Publication PUB088-005-00_1017
61 of 84
P
a
k
s
c
a
n Mo
dbus
Dat
a
Ba
s
e
I
nf
orma
tion
F
ou
nd
ati
on
F
iel
db
us
FF
-01
In
s
tal
lat
io
n m
an
u
al
7.1.1
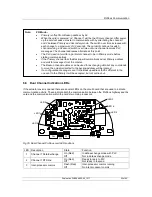
Limited Range Position Minimum and Maximum (Parameter 1 and 2)
These parameter registers are used to define the positions in the range of valve travel that will be
reported as 0 to 100% if it the whole travel from the closed position to the open position is not used. In
addition the position demand setpoint output value will also be modified to follow this limited range.
It is possible to make the position data reported and the position controller relate to a reduced span of
actual valve travel. In this mode the position data relates to the reduced portion of the valve stroke.
This is sometimes used where the valve is required to have a 0% position (or 100% position) that is
not the same as the fully closed position (or fully open position). These parameters define the actual
limited range of valve travel that will be used for the position reporting and control by the positioner.
Note that the digital open and close commands will still make the valve travel over its full stroke. The
special case analogue commands of 0% and 100% that would otherwise cause the actuator to travel
to the limit switch or torque off positions are inhibited if values other than 0 and 100 are set in these
parameters.
The values inserted relate to the maximum total valve travel between closed and open and represent
the point in the full stroke which will now be used for the limited stroke 0 and 100 values.
Not supported by CVA.
7.1.2
Deadband and Hysteresis (Parameter 3 and 4)
When using position control by sending a value to the Actuator Position DV setpoint there are a
number of parameter registers used to tune the position controller and reduce the possibility of
damage to the actuator. These two registers are set to prevent hunting around the setpoint due to high
inertia of the valve. They will require adjustment for each specific application. In addition the Motion
Inhibit Timer is used to ensure the actuator does not carry out an excessive number of starts in a
given period.
Deadband
The control used for the positioner is proportional only. The PFU will
run the actuator to the desired position and then it stops. As the
actuator and valve combination have some inertia there is a possibility
that the desired position may be overrun and the positioner will then
reverse the direction of travel to make the valve adopt the desired
position. This overshoot and return may continue for a number of
cycles and is known as hunting. The valve and actuator combination
will hunt around the setpoint if the inertia is high. To prevent this from
happening there is a Deadband setting whereby once the actuator
enters the deadband the motor will be stopped. For example a 5%
deadband will cause the motor to be stopped once the actual position
0% ----------------- Reported Position --------------------- 100%
Valve Stroke
CLOSED
OPEN
Position Minimum Setting
Position Maximum Setting
Fig 37: Limited Range Position Control and Reporting







































































