





























Profibus DP Mk2 Option Card Installation Manual
62 of 84
Publication PUB088-005-00_1017
is within 5% of the desired position. The inertia will then bring the
actual position nearer the desired position.
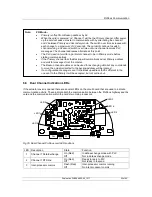
The deadband is the allowable error around the setpoint.
Hysteresis
In addition to the deadband a second setting, hysteresis, further
refines the performance of the position controller. The positioner will
run the actuator towards the setpoint DV until the actual position is
within the deadband minus the hysteresis setting. This has the effect
of instructing the actuator to stop when it is nearer the DV. The
actuator will not restart unless it overshoots and runs outside the
deadband or a new command places the new desired position outside
the deadband.
The Hysteresis is the amount of movement inside the deadband
permitted before the motor stops.
Not supported by CVA.
7.1.3
Slow Mode Range (Parameter 5)
This parameter register is only applicable to IQT actuators. The Slow Mode Range sets the deviation
between the setpoint and current position in positioning mode inside which the actuator motor will slow
to minimum speed.
If the setpoint (DV) is 50% and the setting for this parameter is 10%, then when the actuator moves
within the range 40% to 60% the motor will adopt low speed. The actuator does not use slow mode for
digital (Open/Close) commands.
7.1.4
Motion Inhibit Timer (Parameter 6)
The Motion Inhibit Timer setting is the period that must elapse between consecutive starts of the
actuator motor when in positioning mode. The idle period will prevent the actuator motor from
exceeding its rated number of starts per hour.
0%
Setpoint DV = 50%
100%
Valve Stroke
Position MV = 50%
47% 48% 49% 50% 51% 52% 53%
.
Hysteresis
Hysteresis
Hysteresis = 1%
Deadband
Deadband
Deadband = 3%
CLOSED
OPEN
Position Minimum Setting
Position Maximum Setting
Fig 38: Deadband and Hysteresis settings







































































